The 5th and 6th december, International Conference SIA CESA 5.0 took place in Versailles (just near the Château).
The goal of the organisers is to build a bridge between traditional automotive electronics and the new developments in vehicle electrification and digitalization as well as those from the world of consumer electronics and the Internet of Things.
The event has presented a great opportunity to understand how the automotive business will evolve over the next five years, with a focus on products and services that are likely to transition from other markets into use-cases for automotive.
Gérard Yahiaoui, Nexyad CEO presented a new paper: Real Time Driving Risk Assessment for Onboard Accident Prevention :
Application to Vocal Driving Risk Assistant, ADAS, and Autonomous Driving.
FLEETS CAN TAKE BIG ADVANTAGE OF REAL TIME DRIVING RISK ASSESSMENT : MORE PROFIT, LESS PERSONAL INJURIES, AWARDS FOR SAFER DRIVERS, etc.
SafetyNex is now under deployment by fleet managers :
. alerting drivers BEFORE danger can reduce accident rate by 20% : this is money for the fleet, and also less personal injuries and death
. risk profiles at the end of every trip can be used to deploy serious games : awards and coupons for safer drivers
. risk information sharing : if one driver took a big risk at a given area, then it is possible to automatically warn all the other drivers during a few minutes about a potential danger at this area : “stay vigilant”
Two kinds of fleet managers :
. Professional fleet management companies
. Internal fleet managers of big firms
. for the commercial fleet for instance
. for every employee through Corporate Social Responsability budget
Those ongoing deployments will make big money and will save lives at the same time.
NEXYAD Deep Tech Startup : AI and XAI onboard real time software modules for road safety applicable to ADAS, Autonomous Driving, Car Insurance, Fleet Management, and new Smart Mobility Services.
NEXYAD Executive Pitch video by CEO Gérard Yahiaoui.
– ISFM selected Nexyad algorithms
– SafetyNex episode 6 : Five use cases when your eyes or sensors are not enough
– Autonomous Driving Adaptative to situations with SafetyNex
– Broad Range Applications of Real Time Driving Risk Assessment
– Deep Learning for Onboard Applications: Hidden Trap
– SafetyNex and the “S” Curve Theory
– Congresses & Events
NEXYAD is proud to announce that our Artificial Intelligence Algorithmes are used for Autonomous Driving Vehicles French High Tech Startup ISFM (Intelligent Systems for Mobility) selected Nexyad artificial intelligence algorithms for their Milla Smart Shuttle.
ISFM is one of the companies selected by the Ubimobility 2018 program
* * * * *
SafetyNex episode 6 :
Five use cases when your eyes or sensors are not enough
SafetyNex can save your life part 1: Rainy Curve
SafetyNex can save your life part 2: Tight Curve
SafetyNex can save your life part 3: Priority
SafetyNex can save your life part 4: Stop Sign
SafetyNex can save your life part 5: Pedestrians Crossing
* * * * *
Autonomous Driving Adaptative to situations with SafetyNex
HOW TO MAKE YOUR AUTONOMOUS DRIVING (AD) ADAPTIVE TO SITUATIONS THAT WERE NOT IMAGINED BEFORE
The true function of an autonomous vehicle is to move you from a point A to a point B, as quicly as possible, in comfort and safety (road safety : without accident and even without near-misses). Let’s talk about road safety because it is the job of NEXYAD with the Artificial Intelligence module SafetyNex.
20 times per second, SafetyNex estimates the risk that the driver (Driver is your Autonomous Driving system) takes. In an open world, new situations will happen (not in the scope of your scenarios) and if your AD is not adapted, risk will rise and SafetyNex will detect it. It opens the door to new strategies :
. Simple adaptive response : “if risk too high then slow down” for instance
. Complex adaptive system with deep Learning : if the response led to risk rising it is not the proper one … well it sounds you can improve your AD and even let it learn while it is in use in real vehicles !!!
And you even can modulate easily aggressiveness of your AD (necessary in dense urban areas).
* * * * *
Broad Range Applications of
Real Time Driving Risk Assessment
Driving risk is not predictable from the so called “black spots” location, or from only driving behaviour. Driving risk appears when driving behaviour is not adapted to driving context, and particular, to road infrastructure complexity. There is no inherently bad driving behaviour (it depends on WHERE you drive: a disused airport ? in front of a school ? approaching an intersection ? risk is different for all those case). There is no inherently dangerous infrastructure and all automotive projects that record “black spots” are doomed to failure : they are places where few drivers in the past had a driving behaviour that was not appropriate to infrastructure complexity, and they died in accident. Thousands, millions, of other drivers did not have any accident at this location. What will this information bring to YOU ? Nothing ! It is necessary to evaluate adequation of YOUR driving behaviour to infrastructure complexity.
An AI module does that 20 times per second: SafetyNex.
Driving risk computed by SafetyNex is a core notion with lots of different applications : car insurance, fleet management, commerce, ADAS, Autonomous Driving, Vocal Driving Assistants, …
* * * * *
Deep Learning for Onboard Applications: Hidden Trap
Now Deep Learning is used in onboard detection and pattern recognition applications. NEXYAD for instance uses Deep Learning in RoadNex (road detection without need of markings + detection of free space), and ObstaNex (obstacles detection).
But if you do not analyse your INDUSTRIAL project in detail, you may have bad surprises : everyone thinks he/she knows that the more numerous the training examples, the most accurate the KPIs. Let’s say you used 1 billion km to train and validate your Neural Network (NN) for computer vision. Now a new cam is launched on the market (32 bits per color, 10k) : If you want to use your NN, you will degrade quality of images and put them into your system. If you want to take advantage of your better camera, then you must capture 1 NEW billion km with the new cam and train a new NN.
NOT VERY INDUSTRIAL!
NEXYAD has developed a methodology to get same KPIs with a very picky compact database (easy to reshape the database with new sensors) : A.G.E.N.D.A. (Approche Générale des Etudes Neuronales pour le Développement d’Applications), published in scientific papers in the 90’s – yes – the 90’s by NEXYAD team.
* * * * *
SafetyNex and the “S” Curve Theory
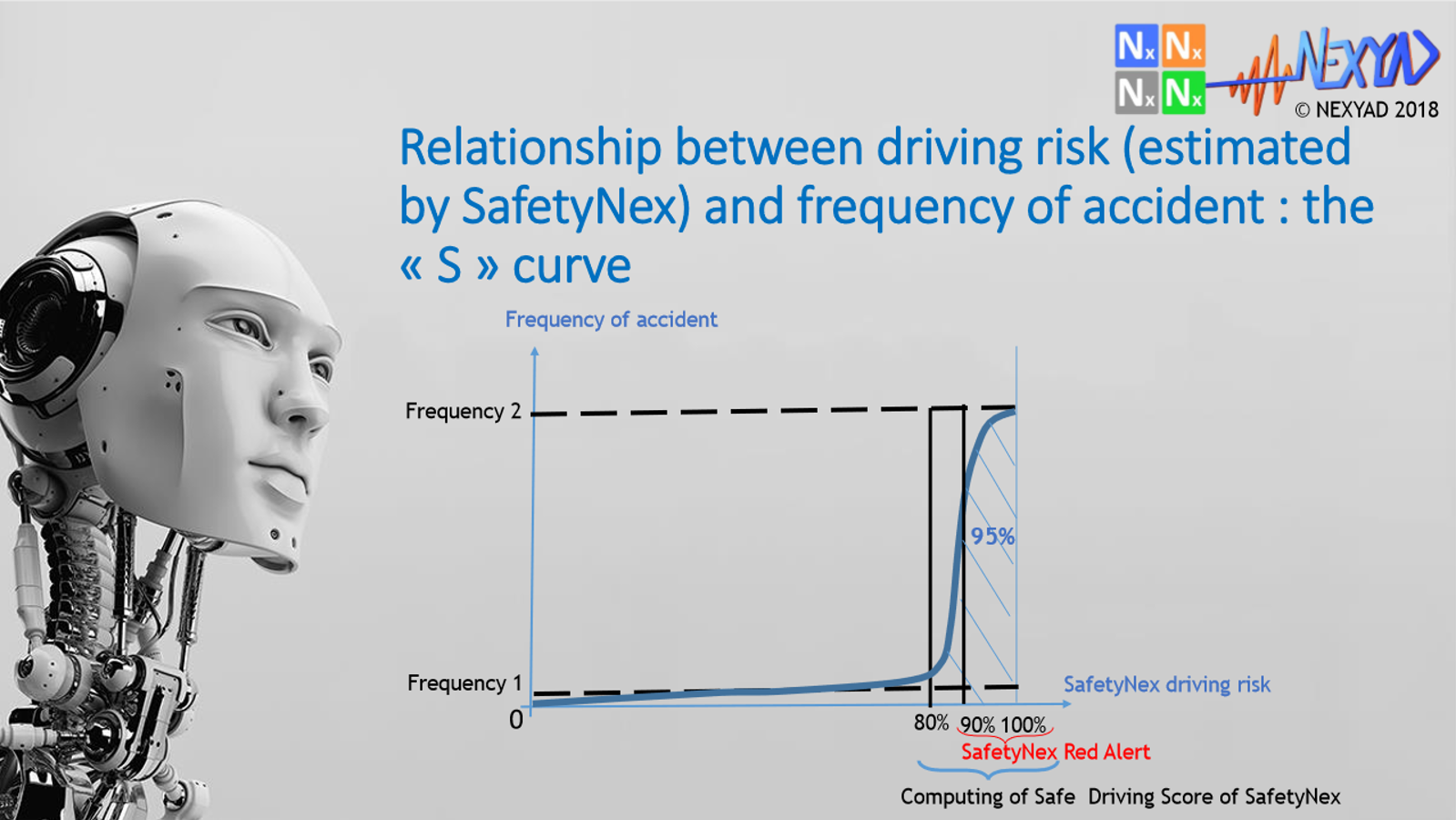
RELATIONSHIP BETWEEN DRIVING RISK AND ACCIDENT : THE “S” CURVE THEORY
Let’s say in a manufacture there is a very dangerous machine that may grind up your hand. If you are 10 km away from the machine, risk is “very” low. If you are 1 km away from the machine, risk is the same. If you are 10 m away from the machine … risk is still very low … but if you come closer (let’s say 10 cm), suddenly risk becomes high ! This is not linear. In road safety, the Artificial Intelligence algorithm SafetyNex estimates 20 times per second the driving risk you take, and many people ask about relationship between “risk you take” and “accident”. This relationship is not deterministic (probabilities must be used) : risk is not linked directly to accident but rather to accident frequency (or probability)… and the relationship is a non linear curve called a “S” curve as shown on the figure below. It is possible then to use it to alert human driver (Vocal Driving Assistants) or to control autonomous driving (Autonomous Vehicle) in order to keep risk under the threshold of the “S” curve or not too far after the threshold. SafetyNex was calibrated in order to have 95% of accident frequency just after the threshold (validated on 50 million km).
Click image to enlarge
* * * * *
Congresses & Events
NEXYAD CEO on Mobility TV about Road Safety applied to AV
Use the YouTube translation to follow with your language.
Gérard YAHIAOUI, CEO of NEXYAD, participed in a TV show on Mobility TV about the Autonomous Vehicle, where he explained the value of SafetyNex for road safety applied to Autonomous Vehicle. The other guests were Jean-Pierre CARNEVALE, departement director for Ipsos, Abdelkrim DOUFENE from IRT SystemX, and Hervé GROS from SIA (automotive engineers society), the talk show was animated by Patrick ROGER for Auto K7.
First French Congress devoted to Autonomous Vehicles
Last 25-26 june, SIA and URF jointly organized the first French conference on the autonomous vehicle in order to cross the views of the whole scientific and technical communities : car manufacturers, suppliers, road infrastructures, telecommunications and transport operators in connection with the national and territorial public decision-makers.
200 experts, 4 sectors, a dozen of exhibitors, 38 interventions, keynotes by Anne-Marie Idrac (AV special adviser), Cédric Villani (AI special adviser) and Luc Chatel (President of PFA), 1 round table of industrial leaders and the public sector, or how to draw up the state of the art for the biggest technological change in mobility and transport.
The goal is to accelerate the capacity for innovation everyone to serve everyone, by bringing all stakeholders together under the aegis of the most relevant experts for the autonomous vehicles of tomorrow.
Gerard Yahiaoui, CEO of Nexyad was invited to talk about SafetyNex on a focus about Intelligent Onboard Technologies.
Gérard Yahiaoui explaining SafetyNex
A.I. key of profitability Conference at TNP
This thursday 14th june, TNP, a consulting firm specializing in business transformation, inaugurated its new generation start-up accelerator! The audience follow interesting conference about Artificial Intelligence in Mobility field.
– Benoit Ranini, TNP : Introduction
– Philippe Giry-Deloison : Conseiller municipal de Neuilly sur Seine
– Stéphane Mallard : Artificial Intelligence, Get ready for disruption
– Juliette Girard, Renault & Adrian Pellegrini, Blue DME : Feedback on futuristic car dealership
– Gérard Yahiaoui, Nexyad : Intelligence on board with SafetyNex
– Demo and business dating with TNP Accelerator’s start-ups
Gérard Yahiaoui, CEO of Nexyad
The European Mobility Exhibition 2018
Transports Publics, the European Mobility Exhibition, is the not-to-bemissed biennial exhibition for all the key players in public transport and sustainable mobility from across Europe. Over 11,000 highly qualified participants come together over three days in Paris to discuss the latest innovations for urban, interurban and regional transport, as well as green mode transport.
Transports Publics is recognised as the leading European showcase for innovations in equipment, services and policies relating to the entire mobility sector, bringing together leading European decision-makers from transport and politics.
This year, we could see for the first time, the new technology for rear-vision on buses,coaches and trucks : the camera-based system instead of mirrors. We visited Vision Systems booth that is the first firm to propose such system with its Smart-Vision product.
Smart-Vision allows to save about 5% gas consumption, that reduces CO2 emissions; the cockpit screens for driver are much more efficient than mirrors, they eliminate sun glare or reflexion problems and of vehicles lights, and they increase visibility at night and tunnel conditions.
This solution has been integrated in Heuliez and Irizar buses as shown on the exhibition, and public transportation operators companies in Europe have already adopted Smart-Vision.
Vision Systems also shown a lidar perception system around vehicle called Savety-Front for collision avoidance.
The trend of 2018 was on electrification for buses in particular, and public transporation in general.
Autonomous pod or shuttle was not yet present except outside with Navya.
For the third consecutive time the Groupement ADAS (cluster) was present to the Autonomous Vehicle Technology World Expo at Messe Stuttgart 5-7 june 2018. Intempora and Nexyad represented the french-canadian cluster sponsorised by Mov’eo Imagine Mobility.
Edition 2018 was quite good, we propose a focus on some companies we saw to the convention.
The Elektrobit industry experts came to share their experience on how to effectively manage a functional and open HAD software architecture on an adaptive AUTOSAR infrastructure. They were keen to demonstrate how the functional software architecture with open interfaces and software modules is integrated on a high-performance microcontroller using an AUTOSAR adaptive middleware. In addition to the functional challenges, the transmission of integrity levels of automotive safety could be explained to you. EB booth visitors could appreciate why the advantage of combining an open software framework for automated driving with a reliable operating environment reduces time-to-market due to fast integration and first system-level testing.
ESI Group is a leading innovator in the field of virtual prototyping software and services. A specialist in materials physics, ESI has developed a unique skill to help industrial manufacturers replace physical prototypes with virtual prototypes, enabling them to manufacture, assemble, certify and pre-certify their future products. Coupled with the latest technologies, ESI now wants to anchor virtual prototyping in the broader product performance lifecycle concept, which addresses the operational performance of a product throughout its life cycle, from launch to disposal. The creation of a hybrid twin, based on simulation, physics and data analysis, allows manufacturers to deliver more readable and connected products.
Sigra Technologies was exhibiting its autonomous driving system, its components and services called Deep Einstein. Its products range from drive-by-wire embedded systems to decision-making based on a deep neural network. The company believes that an approach based on deep learning is the best way to handle hard-to-solve cases using traditional algorithms. During the exhibition, Sigra presented its new system for the demonstration of autonomous driving.
StreetDrone is an ambitious UK self-driving startup with a rich automotive, motorsport and entrepreneurial DNA. The streetDrone team is passionate about putting the AV revolution into the hands of the many , not just the few, providing the platform , data management system and functional safety, thereby allowing businesses and institutions to focus on their own development goals without having to worry about the cost and complication of vehicle hardware and systems engineering. StreetDrone is enabling the next generation of engineering to be involved in what is the most exciting area of technology today.
Veoneer is a leading system supplier for ADAS autonomous driving AD and advanced brake control solutions, and a market leader in automotive safety electronics products. With one of the oadest product portfolios in the larket, Veoneer is the forefront of innovation in the current revolution of the automotive industry. Veoneer takes on the challenge of automation and human-machine tion as vehicles become increasly intelligent.
Vector informatik is a leading manufacturer of software tools and embedded components for the development of electronic systems and their networking with many different systems from CAN to automotive Ethernet. Vector has been a partner of automotive manufacturers and suppliers and related industries since 1988; Its tools and services provide engineers with the decisive advantage to make a challenging and highly complex subject area as simple and manageable as possible. Worldwide customers in the automotive, commercial vehicles, aerospace, transportation and control technology industries rely on the solutions and products of the independent Vector Group for the development of future mobility.
The four algorithms products of Nexyad are now well known by automotive profesionals. Numerus companies worldwide integrated SafetyNex the on board Driving risk assessment in real time, combinable with the three camera-based modules: RoadNex for road detection (edges of road and bitumen free space); ObstaNex for obstacles detection (vehicles and pedestrians); and VisiNex for visibility measurement (fog and heavy rains detection, reliability, distance of visibility, etc.)
MOV’EO Imaging Mobility Forum 2018
Imaging Mobility Forum by MOV’EO, June 7th 2018 at ESTACA, Campus Paris-Saclay.
“Innovation Hubs : a new deal for efficient mobility”
Luc Chatel, PFA President Rémi Bastien, Mov’eo President
– Mov’eo General Assembly – 2017 Management & Financial report
– Keynote : opening by Luc CHATEL, Chairman, French Automotive Industry & Mobilities, Former French Secretary of State for Industry
– Tech Sessions : Blockchain: the ultimate bypassing. New Eldorado for mobility or just a buzz?
Smart Grid: the key for electric mobility solutions ?
ESTACA’LAB research activities on intelligent, clean and safe transport
Conference : Innovation Hubs : a new deal for efficient mobility
– Introduction by Rémi Bastien, Mov’eo Chairman & Ludovic Busson, ESTACA Chairman
– Keynote : Richard Dujardin, CEO France, Transdev & Patrick Pelata, Chairman, Meta Consulting LLC
– Roundtable – European clusters :
Rémi BASTIEN, VP Automotive Prospective, Groupe Renault, Chairman of Mov’eo & VEDECOM Institute
Leo KUSTERS, Managing Director, AutomotiveNL
Maren LOUCHET, International Cooperation, e-mobil BW
Laura MORGAGNI, CEO, Torino Wireless
RELATIONSHIP BETWEEN DRIVING RISK AND ACCIDENT : THE “S” CURVE THEORY
Let’s say in a manufacture there is a very dangerous machine that may grind up your hand. If you are 10 km away from the machine, risk is “very” low. If you are 1 km away from the machine, risk is the same. If you are 10 m away from the machine … risk is still very low … but if you come closer (let’s say 10 cm), suddenly risk becomes high ! This is not linear. In road safety, the Artificial Intelligence algorithm SafetyNex estimates 20 times per second the driving risk you take, and many people ask about relationship between “risk you take” and “accident”. This relationship is not deterministic (probabilities must be used) : risk is not linked directly to accident but rather to accident frequency (or probability) … and the relationship is a non linear curve called a “S” curve as shown on the figure below. It is possible then to use it to alert human driver (Vocal Driving Assistants) or to control autonomous driving (Autonomous Vehicle) in order to keep risk under the threshold of the “S” curve or not too far after the threshold. SafetyNex was calibrated in order to have 95% of accident frequency just after the threshold (validated on 50 million km).
– CES 2018 Nexyad Report
– SafetyNex animated video of a use case : The Car Insurer’s Choice
– Nexyad in media
– SafetyNex can bring Artificial Intelligence into Autopilots in respect of ASIL ISO 26262
– Nexyad team wishes you an happy New Year 2018
For the second time, NEXYAD went to CES (2018) in Las Vegas (from 9th to 12th of Jan).
Takeoff at Paris CDG AirportArrival in Las Vegas
Flight to Vegas from Paris is long but it’s worth the trip for a high-tech startup like NEXYAD.
Of course, for NEXYAD, it is the year of deployment in series for our onboard software modules (Connected car/Car telematics, ADAS, Autopilots, Drive and Car sharing), and especially for SafetyNex (estimation of driving risk 20 times per second), and we had organized for a while 6 meetings per day : ADAS and Telematics OEMs that are already currently integrating SafetyNex, and of course new prospects. Very good new contacts too with qualifies prospects from the USA, Japan, Europe.
We also got some interest for RoadNex that integrates a computer vision based free space detection that works perfectly for large round abouts and intersections. We brought a real time RoadNex implementation into an android smartphone (using the smartphone cam and CPU) and we could do some real time demos that show that RoadNex works in a regular smartphone in real time (for those who care of CPU consumption) :
This year we had a barrow on the LeddarTech booth located at Central Plaza, close to Faurecia, Valeo, Google, Visteon, etc … : LeddarTech is member of the MOV’EO Groupement ADAS, and the whole Groupement was part of the « LeddarTech ecosystem » showcase area.
Leddar Ecosystem Pavillon at LVCCGroupement ADAS Desk
We also used some time slots to do our homeworks on Business Intelligence and visited many boothes including competitors of NEXYAD.
From this visits we could extract some heavy trends : of course, CES deals with quite EVERY subject, then we focused on mobility and what is connected to mobility issues.
First, we must notice that 2018 is THE year of Lidar :
Of course, our partner LeddarTech, but also many other solutions from Startups to Major automotive companies :
LeddarTech;
InnovizVelodyne
QuanergyPioneer
Startup II – VIStartup AEye
Toyota
Another heavy trend is smart cities :
Itron (Energy issues) Deloitte (Complete systems and strategy)
LoRa (IOT) Ericsson (Telecom 5G)
Mobility was a big part of Smart Cities and Urban mobility this year in Las Vegas.
Some soft mobility solutions (electric and connected 2-wheels vehicles) :
UjetGenze
And of course, autonomous shuttles were numerous this year :
As you may notice, you can find shuttles from : a pure leader player, an IT major firm, a major car manufacturer, a major operator of urban mobility, and a high-tech startup.
At least, another completely new trend is the autonomous flying vehicles :
Volocopter
* * * * *
SafetyNex animated video of a use case : The Car Insurer’s Choice
SafetyNex by NEXYAD is a Driving Risk Assessment App/API for prevention (accompanied driving, young drivers, individuals, professional drivers, seniors) in every kind of 4 wheels vehicle. SafetyNex is worth for UBI (risk profiles, usage profiles) at the end of every trip; reduction of costs (lower rate of accident and in particular of personal injuries + transformation of some severe personal injuries accidents into material accidents); Detection of behaviour modifications in time and Distraction detection (mobile phone …) : under implementation.
* * * * *
Nexyad in media
Rémi Bastien interview, the new President of competitive cluster Mov’eo and also President of VEDECOM Institute and VP Automotive Prospective of Renault Group.
For English subtitles click the button on the video
Mov’eo is a Mobility and Automotive R&D competitiveness cluster, which since 2006 has been mobilizing its energies at the service of its members to meet the objectives assigned by the State to competitiveness clusters: to foster the development of collaborative projects between members, to contribute to development in the regions of companies, in particular SMES, and to promote innovation in the sector.
Created in february 2014, VEDECOM is a French Institute for Public-Private Partnership Research and Training dedicated to individual, carbon-free and sustainable mobility.
The new MOV’EO President quote NEXYAD SafetyNex at the beginning of its intervention…
* * * * *
SafetyNex can bring Artificial Intelligence into Autopilots in respect of ASIL ISO 26262
Complex Automation MUST be ASIL ISO 26262.
Artificial Intelligence CANNOT BE ASIL ISO 26262 (by definition) and acts only on parameters of Complex Automation doing ++/– – variations, never skipping « reflexes actions » (emergency braking, etc), but allowing anticipation speed adaptation to reduce frequency of emergency situations (and then give more margin to reflexes actions and also improve comfort). Maximum acceptable Driving Risk can be changed depending on driving situation in order to set « aggressivity level» of HAV.
SafetyNex by NEXYAD is a Driving Risk Assessment App/API for prevention (accompanied driving, young drivers, individuals, professional drivers, seniors) in every kind of 4 wheels vehicle. SafetyNex is worth for UBI (risk profiles, usage profiles) at the end of every trip; reduction of costs (lower rate of accident and in particular of personal injuries + transformation of some severe personal injuries accidents into material accidents); Detection of behaviour modifications in time and Distraction detection (mobile phone …) : under implementation.
Nexyad has developed a smartphone App which is a driving assistance system that alerts the driver IF AND ONLY IF speed of the car is not adequate with the road infrastructure. Then SafetyNex allows the driver to slow down or brake BEFORE a situation of danger. SafetyNex is also available as an API to be integrate into devices or other applications.
Nexyad explains in this video the key notion of driving risk. From zero risk when the car is sleeping into the garage to 100% risk when driving behaviour is by far not adapted to a particular road context.
– Road accident and driving risk are two different notions
– Nexyad at AutoSens Brussels 2017
– Enova Symposium Paris 2017
– Connected & Self-driving Car Meetup #9
– Academic chair at MOV’EO with INSA Rouen
– Sensor fusion and data fusion with SafetyNex
– SafetyNex : Understanding the Concept of Risk
– NEXYAD : the story
– Navigation Based ADAS : use SafetyNex to build ACC and anticipation (predictive) brake systems
Road accident and driving risk are two different notions
A lot of professionals that must cope with road safety observe accident through statistics : it seems to be normal to think that safety is low where there are a lot of accidents and that safety is high where there are few accidents.
This reality tends to make people confuse the two notions : risk and accident.
And since you stay at the statistic level, then it works : if 99% of people that played russian roulette more than 50 times have died (accident), then you can say that russian roulette is risky (risk).
Insurance companies, fleet managers, have taken into account those statistics, in order to estimate their future costs, and compute their pricing.
But now, digital connected devices are available at the very individual and local level : telematics (professional devices installed into cars), smartphones, connected car, can estimate the driving behaviour in real time and they know exactly where you drive.
Then, what this new technology brings to risk assessment ? and can you still apply at the individual level the ideas that was set at a population (statistics) level ?
That question was studied in 1969 by an American University Professor that was also a researcher for the company “Insurance of North America”, Frank E. BIRD, and a key notion was then used : the “incident” or “near miss accident” or “quasi accident”. It was shown that the risk you take does not lead to accident but to “quasi-accident”. Indeed, even in very risky situations, accident can be avoided most of the time at the very last second ! Frank E. BIRD worked on what was called “The Triangle of Risk” or “Safety Triangle”
Sometimes, you do not have luck … and then you have an accident instead of having a quasi-accident.
Example of Statitical Relationship in Risk Assessment : from Behaviour to Fatalities
Then accident is the confluence of “risk you take” and “bad luck”. It is interesting to notice that, if you do not study the individual and local (in space and time) level, so if you consider a large population of drivers during a long duration, then “bad luck” automatically disappears… and so risk can be measured by observation of accident. But at the individual and local levels, risk cannot be measure by observing accident.
It is interesting to read about Safety Triangle and then have a clear idea of links between RISK, ACCIDENT, SEVERE PERSONAL INJURIES.
In road Safety concerns, researchers and experts have been working during 50 years on this concept of quasi-accident and they accumulated data and knowledge about this key notion. Let us resume the russian roulette comparison : pulling the trigger is the quasi-accident … and sometimes you die (accident). But even before playing such a “game” you KNOW that it is risky.
The knowledge of risk is represented by a collection of cause-effect relationships.
There is a knowledge-based artificial intelligence system that gathered the knowledge from road safety experts and researchers (that work mainly on road infrastructure) and that is now available in order to assess driving risk in real time : SafetyNex developed by the company NEXYAD. SafetyNex is the “thermometer” of driving risk and it alerts the driver BEFORE the dangerous situation, letting time to slow down and then potentially to avoid accident, to reduce severity (less personal severe injuries), …
Obviously, markets are :
. car insurance (prevention, severity, UBI)
. fleet management (prevention, reduction of costs, fit in regulations and laws)
But even the automotive can take benefit of suche a real time driving risk assessment module :
. intelligent navigation with risk vocal alerts
. automatic triggering of braking for ADAS (if risk too high then slow down)
. driverless cars : giving to the artificial intelligence that drives the car the perception of the risk it takes…
SafetyNex opens the door to a new generation of onboard applications for every field of automotive sector that is concerned with risk and safety. Read more
* * * * *
Nexyad at AutoSens Brussels 2017
AutoSens took place at the AutoWorld Museum in Brussels September 19-21.
To answer the issues of Connected Cars and Autonomous Cars, engineers need first to give eyes, ears and A.I. to future vehicles. Sensors will play this crucial and difficult role of replacing the human senses.
Engineers and sensors providers met for three days of conferences and workshops.
Groupement ADAS was present with Leddartech the lidars canadian company that rose 100 M$ funding, New Imaging Technologies with their unique high dynamic range camera sensors, Intempora that provide famous RT-Maps, and of course Nexyad presented his three camera-based software modules for Road Detection – RoadNex, for Obstacles Detection – ObstaNex, for Visibility Measurement – VisiNex and SafetyNex – the Road Safety system with sensors fusion and data fusion (digital map, accelerometers, GPS, cameras, lidars, radars, ultrasounds, weather data, traffic data, etc.).
New players appeared as Crowdflower or Mighty Ai, they are plateforms that help you process your data or images very quickly by dividing the workload with very many people registered online.
* * * * *
Enova Symposium Paris 2017
Round Table at ENOVA symposium in Paris, on the subject of self-driving car
(see from left to right)
. Vincent ABADIE, Vice-President Expert Leader Autonomous Vehicle and ADAS, PSA Group
. Jochen LANGHEIM, Vice-President advanced systems R&D programs, ST MICROELECTRONICS
. Jean-François SENCERIN, Autonomous Driving NFI/PFA Program Director
. Gérard YAHIAOUI CEO, NEXYAD
. Guillaume DEVAUCHELLE, Vice-President Innovation, VALEO
. Alain PIPERNO, Expert Safety & Autonomous Vehicle, UTAC
The audience could listen to this experts panel and ask questions about connected and driverless cars.
Journalist : Laurent MEILLAUD
ENOVA, Paris, Porte de Versailles
3 days of exchanges and conviviality at the service of Innovation + Business Meetings driven by THE NEW NEEDS OF CONNECTIVITY. Read more about the Event
* * * * *
Connected & Self-driving Car Meetup #9
Nexyad was invited to the Connected & Self-driving Car Meetup #9 at Le Square (Renault’s innovation lab in Paris), on september 13.
Thanks to the perfect organisation of Laurent Dunys and Bruno Moncorge.
A large audience listened presentation about vehicles and data security with Nabil Bouzerna of IRT SystemX. Finally, Jean-François Menier, lawyer at Elyos Avocats gave a very interesting wrap-up about the potential responsibility of a driver in the case of a connected / self-driving car accident and of course about driver and passengers safety with SafetyNex App : real time driving risk assessment.
* * * * *
Academic chair : effective collaboration between MOV’EO groupement ADAS and INSA Rouen
MOV’EO Groupement ADAS built an academic chair with INSA ROUEN (option Intelligent Transportation) on ADAS and driverless cars.
The first course was given by Gérard YAHIAOUI, CEO of NEXYAD, the 13th of September 2017 in Rouen : presentation of key notions (near missed accident, driving risk), and presentation of SafetyNex (real time driving risk assessment) and applications to car insurance, fleet management, ADAS, and driverless cars.
* * * * *
Sensor fusion and data fusion with SafetyNex
SafetyNex is a real time driving risk assessment system. Of course, Driving Risk makes everyone think of car insurance and fleet management. And it is a natural application (deployment has already started). But it is important to note that Driving Risk is also a key notion for ADAS and Driverless car.
Indeed, Driving Risk happens when there is no adequation between Driving Behaviour and Driving Context. ADAS and Driverless act on Driving Behaviour :
. ADAS modifies Driving Behaviour : braking when the human driver did not, etc …
. Driverless car creates Driving Behaviour : there is still a driver called “artificial intelligence”.
Driving context is measured :
. Map Electronic Horizon
. GPS
. Accelerometers
. Times to collision (front and rear)
. Number of vulnerables around (even on sidewalks)
. Atmospheric visibility / weather condition (fog, pouring rain, etc.)
. X2Car Data Streams (accident, weather alert, construction area, etc.
So you can now imagine that if you have the opportunity to ESTIMATE adequation between Driving Behaviour and Driving Context, then you can build much more relevant ADAS and Driverless Artificial Intelligence (adequation or inadequation).
You may notice that Driving Context is measured through heterogenous sensors and data streams. It brings no difficulty to SafetyNex that uses Fuzzy Sets and Possibility Theory to estimate adequation, givin a Driving output called Driving Risk (that you should want to minimize under constraints of mobility efficiency).
Then SafetyNex is actually a sensor and data fusion system (high level fusion), much more efficient than every fusion systems that you ever developed, because it generates a variable (Driving Risk) that is a KEY NOTION for driving and is EASY TO UNDERSTAND AND USE.
NEXYAD implemented a low cost version with only the first 3 inputs (more than 5,000 road safety rules to cope with the infrastructure dangers …) and is now implementing simple rules to take into account mobile context. Example: “the shorter the time to collision, the higher the risk”. And that’s it ! The knowledge based artificial intelligence of SafetyNex automatically does the fusion with the 5,000 rules. There is no need to “weight” the rules, as possibility theroy allows a fusion with every rule competing with the others … Elegant applied maths to a problem that most engineers describe in a so complicated way that it becomes impossible to solve.
We really encourage ADAS and Driverless engineers to come to us and simply integrates SafetyNex (low CPU consumption, easy real time, etc.) and then get NOW a proven sensor fusion and data fusion system that works. This gives ONE dimension of Driving Systemic Analysis items: Driving Risk, in real time.
Of course, if you do the systemic analysis you will find other dimensions of interest (we let you do that, we’ve done it for ourselves, trace of the military research past of NEXYAD founders).
SafetyNex is now under implementation by big ADAS OEM companies. Series deployment will start in 2018. We will be glad to help you being a part of it.
* * * * *
SafetyNex : Understanding the Concept of Risk
SafetyNex App is a real time driving risk assessment. We present below 3 videos to explain as simply as possible the concept of driving risk.
Luck doesn’t change the risk that the driver takes. It means that risk taken by the « lucky risky driver » is exactly the same than risk taken by the « unlucky risky driver ». It is possible then to detect risky drivers before they have accident (anticipation of costs). Once detected, it is possible to train them (prevention program).
Because SafetyNex driving risk assessment is done in real time, it is possible to alert the driver (when risk is higher than an acceptable value), and if driver slows down, then risk never rises at the red level. It is an onboard prevention system (ADAS).
Observation of accidents on a short period of time (3 months for instance) may not show any difference between « cautious driver » and « lucky risky driver » (both of them may not have accident). It is a big problem for UBI, and SafetyNex brings the solution as it anticipates accident (sooner or later the « lucky risky driver » will have a severe accident).
All you have to know about the french High Tech company.
NEXYAD is a “fake startup” (much older than it seems ^^) set up in 1995 by maths research engineers (Pierre DA SILVA DIAS & Gérard YAHIAOUI + other shareholder : researchers, finance executives, engineers). Founders came from military research (anti-tank missiles), with a strong culture of computer vision, machine Learning, artificial intelligence, signal theoy and processing, stats and data analysis.
During years we were the extended maths team of famous big firms in many fields : defence, automotive, banking, insurance, energy, cosmetics, agri-food, glass, railways, … Customers were research departments first, and then product and marketing departments, sales departments, industrial labs, manufactures, actuaries, etc.
In the automotive sector, we’ve been involved in a lot of different high level maths works such as :
. production/manufacture (work for PSA Group, Charleville),
. industrial Lab (work for PSA Group – Belchamp,TOYOTA Europe – Brussels, Robert BOSCH GmbH, Bühlertal, VALEO, La verrière – SAINT GOBAIN, … etc.)
. research & development for PSA Group, RENAULT, NISSAN, IEE, DAIMLER, FAURECIA, LE LAB (PSA RENAULT), on perception by camera, radar, capacitive sensors, ultrasound, infrared, etc … , vehicle dynamics (active control), sensorial analysis (touch smell perception of texture by vision), human factor analysis, detection of passengers on seats, odor gas sensors, artificial intelligence, epidemiologic analysis (pollution, particles, …), etc.
Navigation Based ADAS : use SafetyNex to build ACC and anticipation (predictive) brake systems
Imagine a robotized car that would slow down automatically when approaching a tiny curve, or an intersection or a priority, of a stop sign, etc … if needed (i.e. if and only if the current speed and acceleration of the car is not appropriate to the driving context). Sounds interesting ?
It would be then “smooth anticipation braking” (from 0.1 to 0.3 g) instead of “emergency braking” (so easier to do and not that disturbing for driver and passengers comfort in the car). Doing this, the car dramatically decreases the probability to be kept in a dangerous situation and it let much more margin to emergency brake if still needed.
Finally, it would mean that the car follows road traffic code plus safety rules (anticipation).
This is easy to achieve using NEXYAD real time driving risk assessment module SafetyNex : SafetyNex reads “Electronic Horizon” (reading POIs and decoding shape and dimensions of the infrastructure ahead), “GPS“, “accelerometers“, and can accept additional inputs such as “time to collision“, “size of free space“, “position in the lane“, “atmospheric visibility“, alert data streams (weather, accident, traffic, …). All those heterogenous data are used (data fusion) to estimate driving risk in real time : Driving Risk (t)
Then everytime that Driving Risk(t) comes higher than an acceptable threshold value, the robotized car slightly slows down … and that’s it ! SafetyNex is the result of 15 years of collaborative research and it works.
Markets : Car insurance and fleet managers (for real time alert and risk profiles recording), ADAS (for automatic predictive/anticipation brake), and Driverless car (Automated car that follows Road Traffic Code).
SafetyNex is Under deployment, please feel free to try it and put it into your own products (available as an API).
Keywords : Adaptive Cruise Control, ACC, Intelligent ACC, Intelligent Cruise Control, navigation-based, navigation-based ADAS, NB ADAS, ADAS, Advances Driver Assistance Systems, Anticipation brake, Predictive Brake, SafetyNex, Risk, Driving Risk, Real time driving risk assessment, road traffic code, SafetyNex, electronic horizon, GPS, accelerometers, time to collision, free space, size of free space, position in the lane, lane departure, visibility, atmospheric visibility, data stream, weather, accident, traffic, data fusion,…
A lot of professionals that must cope with road safety observe accident through statistics : it seems to be normal to think that safety is low where there are a lot of accidents and that safety is high where there are few accidents.
This reality tends to make people confuse the two notions : risk and accident.
And since you stay at the statistic level, then it works : if 99% of people that played russian roulette more than 50 times have died (accident), then you can say that russian roulette is risky (risk).
Insurance companies, fleet managers, have taken into account those statistics, in order to estimate their future costs, and compute their pricing.
But now, digital connected devices are available at the very individual and local level : telematics (professional devices installed into cars), smartphones, connected car, can estimate the driving behaviour in real time and they know exactly where you drive.
Then, what this new technology brings to risk assessment ? and can you still apply at the individual level the ideas that was set at a population (statistics) level ?
That question was studied in 1969 by an American University Professor that was also a researcher for the company “Insurance of North America”, Frank E. BIRD, and a key notion was then used : the “incident” or “near miss accident” or “quasi accident”. It was shown that the risk you take does not lead to accident but to “quasi-accident”. Indeed, even in very risky situations, accident can be avoided most of the time at the very last second ! Frank E. BIRD worked on what was called “The Triangle of Risk” or “Safety Triangle”
Sometimes, you do not have luck … and then you have an accident instead of having a quasi-accident.
Example of Statitical Relationship in Risk Assessment : from Behaviour to Fatalities
Then accident is the confluence of “risk you take” and “bad luck”. It is interesting to notice that, if you do not study the individual and local (in space and time) level, so if you consider a large population of drivers during a long duration, then “bad luck” automatically disappears… and so risk can be measured by observation of accident. But at the individual and local levels, risk cannot be measure by observing accident.
It is interesting to read about Safety Triangle and then have a clear idea of links between RISK, ACCIDENT, SEVERE PERSONAL INJURIES.
In road Safety concerns, researchers and experts have been working during 50 years on this concept of quasi-accident and they accumulated data and knowledge about this key notion. Let us resume the russian roulette comparison : pulling the trigger is the quasi-accident … and sometimes you die (accident). But even before playing such a “game” you KNOW that it is risky.
The knowledge of risk is represented by a collection of cause-effect relationships.
There is a knowledge-based artificial intelligence system that gathered the knowledge from road safety experts and researchers (that work mainly on road infrastructure) and that is now available in order to assess driving risk in real time : SafetyNex developed by the company NEXYAD. SafetyNex is the “thermometer” of driving risk and it alerts the driver BEFORE the dangerous situation, letting time to slow down and then potentially to avoid accident, to reduce severity (less personal severe injuries), …
Obviously, markets are :
. car insurance (prevention, severity, UBI)
. fleet management (prevention, reduction of costs, fit in regulations and laws)
But even the automotive can take benefit of suche a real time driving risk assessment module :
. intelligent navigation with risk vocal alerts
. automatic triggering of braking for ADAS (if risk too high then slow down)
. driverless cars : giving to the artificial intelligence that drives the car the perception of the risk it takes…
SafetyNex opens the door to a new generation of onboard applications for every field of automotive sector that is concerned with risk and safety. Read more
MOV’EO Groupement ADAS built an academic chair with INSA ROUEN (option Intelligent Transportation) on ADAS and driverless cars.
The first course was given by Gérard YAHIAOUI, CEO of NEXYAD, the 13th of September 2017 in Rouen : presentation of key notions (near missed accident, driving risk), and presentation of SafetyNex (real time driving risk assessment) and applications to car insurance, fleet management, ADAS, and driverless cars.
NEXYAD Automotive & Transportation Newsletter #14, December 23th, 2016
Check NEXYAD Technologies for New Mobility Applications
Headlines :
– Demo video of SafetyNex : Smartphone App Onboard Real Time for Driving Risk Assessment
– Cercle LAB Symposium : new digital technologies for Insurance and Bank
– FinTech Community Symposium
– New Release of SafetyNex : Real Time Driving Risk Assessment for Car Industry and Insurance Companies
– Nexyad Technologies for Car Industry and New Mobility : SafetyNex – RoadNex – ObstaNex – VisiNex
– R&D project BIKER ANGEL (Driving Risk Assessment for Motorbikes) has been certified by the pôle FINANCE INNOVATION
– Business Trip to CES at Las Vegas
R&D project BIKER ANGEL has been certified by the pôle FINANCE INNOVATION.
This project consists in making SafetyNex available for motorcycles.
Partners of this project are : HERE, IFSTTAR, NEXYAD, POINT CORE
NEXYAD is the project leader.
Submission of this project has been sent to FUI (Fond Unifié Interministériel – France).
Le project BIKER ANGEL a été labellisé par le Pôle FINANCE INNOVATION.
Ce projet consiste à adapter SafetyNex pour les motards.
Les partenaires de ce projet sont : HERE, IFSTTAR, NEXYAD, POINT CORE
BIKER ANGEL est porté par NEXYAD.
Ce projet fait l’objet d’une demande FUI.
Nexyad SafetyNex, Onboard Real Time App of Driving Risk assessment, received Label Finance Innovation 2016 from world cluster Finance Innovation !
FINTECH COMMUNITY 4e édition à Paris le 7 décembre, le plus grand rendez-vous bi-annuel de rencontres entre le monde des financeurs et des sociétés de technologies innovantes. Nexyad, au travers de l’application de mesure temps réel du risque en conduite : SafetyNex, a reçu le Label Finance Innovation 2016 par le pôle de compétitivité mondial Finance Innovation.
Plus tard dans la matinée, Gérard Yahiaoui, le P-DG de Nexyad, a pitché dans la catégorie Assurances FinTech et a récolté le plus grand nombre de votes de la part de l’assistance, recevant un autre prix à cette occasion qui permettra une exposition conséquente de SafetyNex.
30th Nov 2016, seven high-tech startups had to pitch in front of almost all French Insurance Companies. This was organized by the Cercle LAB (Laboratoire Assurance Banque), at ALLIANZ tower (Paris La Défense) : “colloque prospective annuel du cercle LAB”.
NEXYAD was introduced to Cercle LAB by the competitiveness cluster FINANCE & INNOVATION.
It was an interesting challenge and the jury had to pick only ONE startup from seven talented ones, to give the special prize “coup de coeur des assureurs”.
Gérard Yahiaoui pitching at Allianz Tower “Coup de Cœur des Assureurs” Diploma
NEXYAD pitched on SafetyNex : a smartphone App for real time onboard driving risk assessment (with vocal alerts that warn the driver before a potential danger), that can reduce accident rate by 20%.
Winner : NEXYAD !!!
We thank all the insurers that came to this high tech day that gave a broadchurch view on research and development for Insurance applications (artificial intelligence, deep learning, iot, blockchain, telematics, …), we thank Pôle FINANCE INNOVATION & Cercle LAB.
NEXYAD is member of MOV’EO, and FINANCE INNOVATION.
We use cookies to understand how you use our site and to improve your experience. By continuing to use our site, you accept our use of cookies. AcceptPrivacy & Cookies Policy Read More
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.




















 Takeoff at Paris CDG Airport Arrival in Las Vegas
Takeoff at Paris CDG Airport Arrival in Las Vegas
 Leddar Ecosystem Pavillon at LVCC Groupement ADAS Desk
Leddar Ecosystem Pavillon at LVCC Groupement ADAS Desk LeddarTech;
LeddarTech; 
 Innoviz Velodyne
Innoviz Velodyne
 Quanergy Pioneer
Quanergy Pioneer
 Startup II – VI Startup AEye
Startup II – VI Startup AEye

 Itron (Energy issues) Deloitte (Complete systems and strategy)
Itron (Energy issues) Deloitte (Complete systems and strategy)
 LoRa (IOT) Ericsson (Telecom 5G)
LoRa (IOT) Ericsson (Telecom 5G)
 Ujet Genze
Ujet Genze
 Navya IBM (Olli)
Navya IBM (Olli)
 Toyota (ePalette) Transdev
Toyota (ePalette) Transdev



 Example of Statitical Relationship in Risk Assessment : from Behaviour to Fatalities
Example of Statitical Relationship in Risk Assessment : from Behaviour to Fatalities










