SafetyNex Episode 6 : SafetyNex can save your life part 3
Priority use case

BROAD RANGE APPLICATIONS OF REAL TIME DRIVING RISK ASSESSMENT
Driving risk is not predictable from the so called “black spots” location, or from only driving behaviour. Driving risk appears when driving behaviour is not adapted to driving context, and particular, to road infrastructure complexity. There is no inherently bad driving behaviour (it depends on WHERE you drive: a disused airport ? in front of a school ? approaching an intersection ? risk is different for all those case). There is no inherently dangerous infrastructure and all automotive projects that record “black spots” are doomed to failure : they are places where few drivers in the past had a driving behaviour that was not appropriate to infrastructure complexity, and they died in accident. Thousands, millions, of other drivers did not have any accident at this location. What will this information bring to YOU ? Nothing ! It is necessary to evaluate adequation of YOUR driving behaviour to infrastructure complexity.
An AI module does that 20 times per second: SafetyNex.
Driving risk computed by SafetyNex is a core notion with lots of different applications : car insurance, fleet management, commerce, ADAS, Autonomous Driving, Vocal Driving Assistants, …

DEEP LEARNING FOR ONBOARD APPLICATIONS: HIDDEN TRAP
Now Deep Learning is used in onboard detection and pattern recognition applications. NEXYAD for instance uses Deep Learning in RoadNex (road detection without need of markings + detection of free space), and ObstaNex (obstacles detection).
But if you do not analyse your INDUSTRIAL project in detail, you may have bad surprises : everyone thinks he/she knows that the more numerous the training examples, the most accurate the KPIs. Let’s say you used 1 billion km to train and validate your Neural Network (NN) for computer vision. Now a new cam is launched on the market (32 bits per color, 10k) : If you want to use your NN, you will degrade quality of images and put them into your system. If you want to take advantage of your better camera, then you must capture 1 NEW billion km with the new cam and train a new NN.
NOT VERY INDUSTRIAL!
NEXYAD has developed a methodology to get same KPIs with a very picky compact database (easy to reshape the database with new sensors) : A.G.E.N.D.A. (Approche Générale des Etudes Neuronales pour le Développement d’Applications), published in scientific papers in the 90’s – yes – the 90’s by NEXYAD team.


NEXYAD will be present at Autonomous Vehicle World Expo 2018 in Stuttgart, June 5 – 6 – 7
Come to visit Nexyad on Groupement ADAS booth 2015/hall C
Discover our 4 Artificial Intelligence Algorythms for ADAS, Autonomous Driving and Telematics
SafetyNex : Real Time Driving Risk Assessment
Fusion of Digital Map with Sensors, combinable with RoadNex, ObstaNex and VisiNex
Artificial Intelligence giving Safety to your Driver Assistant or your Autonomous Driving Systems
RoadNex : Detection of Road Edges and Free Space on front of Vehicle
Artificial Mono Vision Algorythm for Autonomous Driving & ADAS
ObstaNex : Detection of Obstacles on front of Vehicle
Artificial Mono Vision Algorythm for Autonomous Driving & ADAS
VisiNex : Measurement and Score of Visibility
Detection of Lack of Visibility, Fog, Heavy Rains, etc… on front of Vehicle
Artificial Mono Vision Algorythm for Autonomous Driving & ADAS
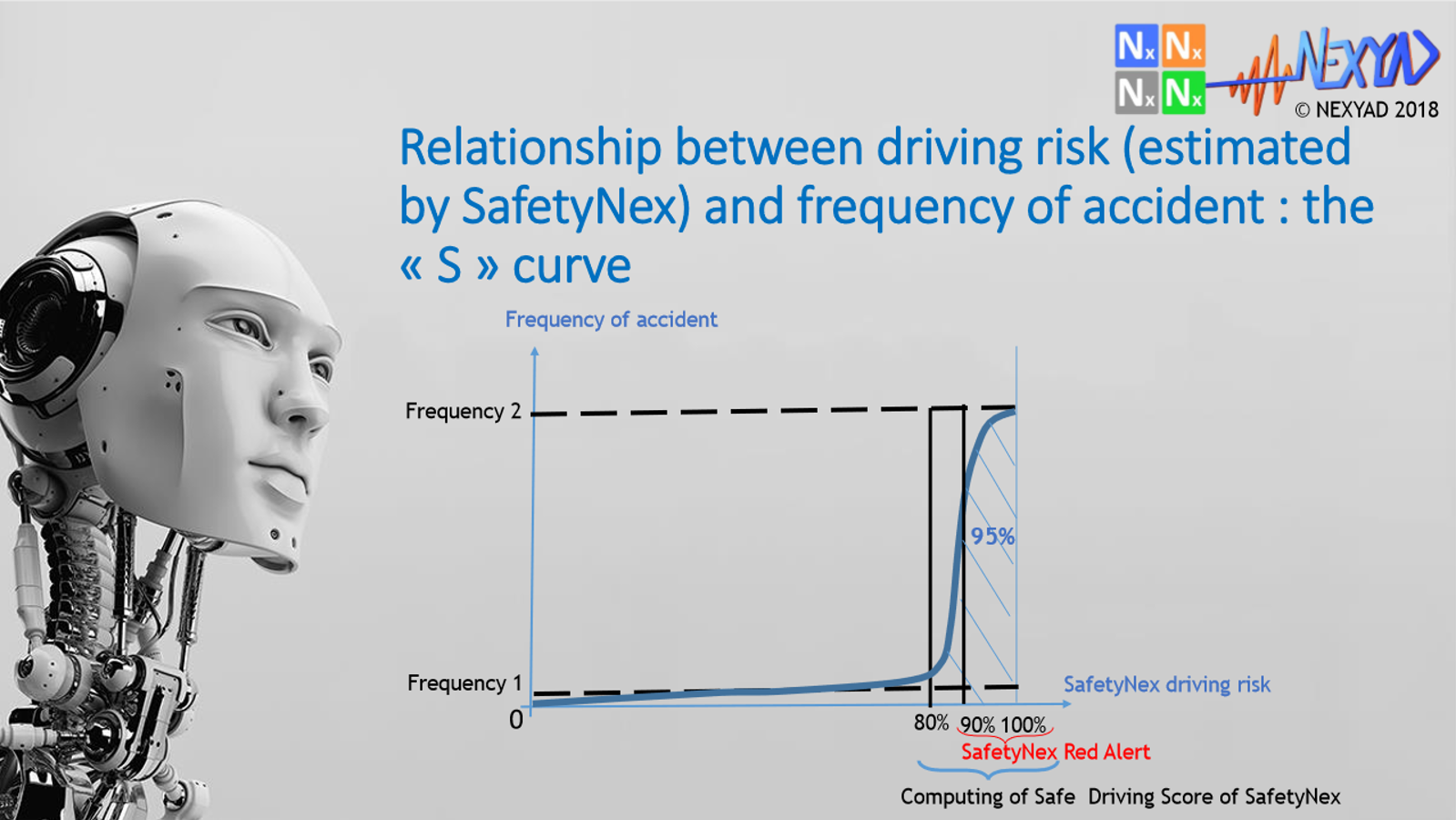
RELATIONSHIP BETWEEN DRIVING RISK AND ACCIDENT : THE “S” CURVE THEORY
Let’s say in a manufacture there is a very dangerous machine that may grind up your hand. If you are 10 km away from the machine, risk is “very” low. If you are 1 km away from the machine, risk is the same. If you are 10 m away from the machine … risk is still very low … but if you come closer (let’s say 10 cm), suddenly risk becomes high ! This is not linear. In road safety, the Artificial Intelligence algorithm SafetyNex estimates 20 times per second the driving risk you take, and many people ask about relationship between “risk you take” and “accident”. This relationship is not deterministic (probabilities must be used) : risk is not linked directly to accident but rather to accident frequency (or probability) … and the relationship is a non linear curve called a “S” curve as shown on the figure below. It is possible then to use it to alert human driver (Vocal Driving Assistants) or to control autonomous driving (Autonomous Vehicle) in order to keep risk under the threshold of the “S” curve or not too far after the threshold. SafetyNex was calibrated in order to have 95% of accident frequency just after the threshold (validated on 50 million km).
Click image to enlarge
Watch this 2 minutes video showing 5 concrete examples of driving situations where the eyes of the driver and the ADAS sensors of the vehicle are not sufficient to prevent accident.
Watch this 2 minutes video explaining the Car Manufacturer Director Point of Vue.