


Copyrights NEXYAD 2005 all rights reserved
Terms of use of images and graphics copied from this page : Policy
keywords
: advanced drivers assistance, adas,
road safety, obstacle detection,
on board vision, road detection, visibility estimation, distance of
visibility, fog detection, rain detection, adherence estimation,
adhesion estimator, grip estimation, road tire grip, available
technology,
time to business, monitoring, image compression, fast image
binarization, obstacle detection video, obstacle detection film,
obstacle detection movie, road detection video, road
detection film, road detection movie,
Algorithms
for Advanced Driver Assistance Systems (ADAS) and road safety
applications
Road detection :
Visibility estimation :
300 tracks virtual sensor for car dynamics :
The
following technologies are available. If you develop applications,
think about building your solutions on the basis of existing and
working subsystems ... instead of developping your own low level
algorithms from the start ... Time to business should be shorter !
These on-board algorithms are available both as .dll or as RT-MAPS modules.
These on-board algorithms are available both as .dll or as RT-MAPS modules.
Advanced
Drivers Assistance (ADAS) and Road Safety Applications
NEXYAD was
one of the major partners of the French
research program
ARCOS. We developped 3 algorithms usable in real time (on board
solutions) for Advanced Drivers Assistance Systems (ADAS) or Road
Safety Applications :
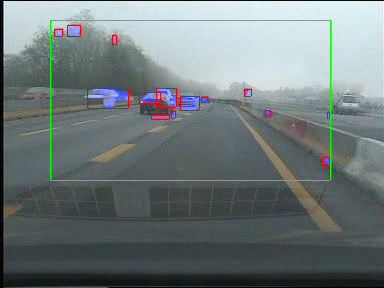
Obstacles detection :
Obstacles detection :
Road detection :

Visibility estimation :
|
Example
of results : click on the image to start the movie
 |
NEXYAD is involved into visibility
measurement for more than ten years. We developed algorithms and a very
strong know-how on this field of artificial vision. In particular, we
developed a tool called VisiNex that lets test the wiper system
efficiency (including rain sensors, software strategy, blade, rubbers,
motors, ...). We also worked on an on-board algorithm. You can download HERE a film of this on-board visibility estimation. |
300 tracks virtual sensor for car dynamics :
|
Sensors
: regular
sensors set + speed sensor (may be replaced with a virtual sensor)
Needed : Driver's command signals (on CAN bus) Results : estimated longitudinal and lateral grips Minimum level of acceleration/deceleration needed : 2 m/s2 Even in the cases where the grip is not well estimated, dynamics of the model and of the real vehicle are similar enough to consider the 300 tracks of the model as 300 virtual sensors. Average convergence time : 1 s |
Example
of results :
|
This research is made by NEXYAD in
partnership with the french research company SERA CD that developed a
car simulator (CALLAS). NEXYAD's algorithms re-adjust the parameters
presets of the car model in real time. One of the presets concerns the
grip. Once the dynamics of the simulation is similar enough to the
dynamics of the real vehicle, the 300 tracks of the model are
considered as 300 virtual sensors. |