Demonstration to Continental of Dreamotor1
![]()

![]()
Feb 15th, Dreamotor1 was tested by several persons of Continental around Renault Guyancourt (west of Paris).

![]()
![]()
Feb 15th, Dreamotor1 was tested by several persons of Continental around Renault Guyancourt (west of Paris).
| We could showcase DREAMOTOR1 yesterday at RENAULT with NEXYAD of course, and our partner HERE Technologies. Functions showcased: . Safety score, . Safety CoachThere will be many showcases of DREAMOTOR1 in France and in Europe during 2022.We have integrated technologies from NEXYAD, INTEMPORA, ECOTECHNILIN, and we wrote all the global and detailed specifications for integration of technologies from SBG Systems, YOGOKO, IMPORTANT. |
 |
We are discussing with GREENERWAVE to fancy the best way to integrate their technology. DREAMOTOR1 is already the smarter demo car and will remain it in time.
On the picture at RENAULT Guyancourt, I am with Olivier Beldi from HERE Technologies. HERE Technologies believed in NEXYAD from the very start, And we showcase together at RENAULT (that have signed with GOOGLE), and in a way, we « bring » HERE with us, and they help us being better. Small teams may bring strategic advantages … We’re happy about this.
Now that we have DREAMOTOR1, our unique embedded cognitive AI technology SafetyNex, which is second to none, can be showcased for 3 functions:
. Safety Score: much more accurate and relevant than TESLA one. Think again ! it is not everyday that you have the opportinuty to take over TESLA !
. Safety Coach that advices driver during trip and helps to avoid most emergency situations (and then many accidents)
. Preventive ACC / AD (soon available on DREAMOTOR1) that controls vehicle speed in order to keep driving behavior cautious regarding static and dynamic contexts
Nobody stops Dreamotor 1.
#NEXYAD #HERE #HEREtechnologies #TESLA #RENAULT #DREAMOTOR1 #AI #embedded #ADAS #GOOGLE #CognitiveAI #DemoCar #Emergency #EmergencySituations #Accident #RoadSafety
#INTEMPORA #ECOTECHNILIN #SBGSystems #YOGOKO #GREENERWAVE #FHELECTRONICS #IMPORTANT
– ISFM selected Nexyad algorithms
– SafetyNex episode 6 : Five use cases when your eyes or sensors are not enough
– Autonomous Driving Adaptative to situations with SafetyNex
– Broad Range Applications of Real Time Driving Risk Assessment
– Deep Learning for Onboard Applications: Hidden Trap
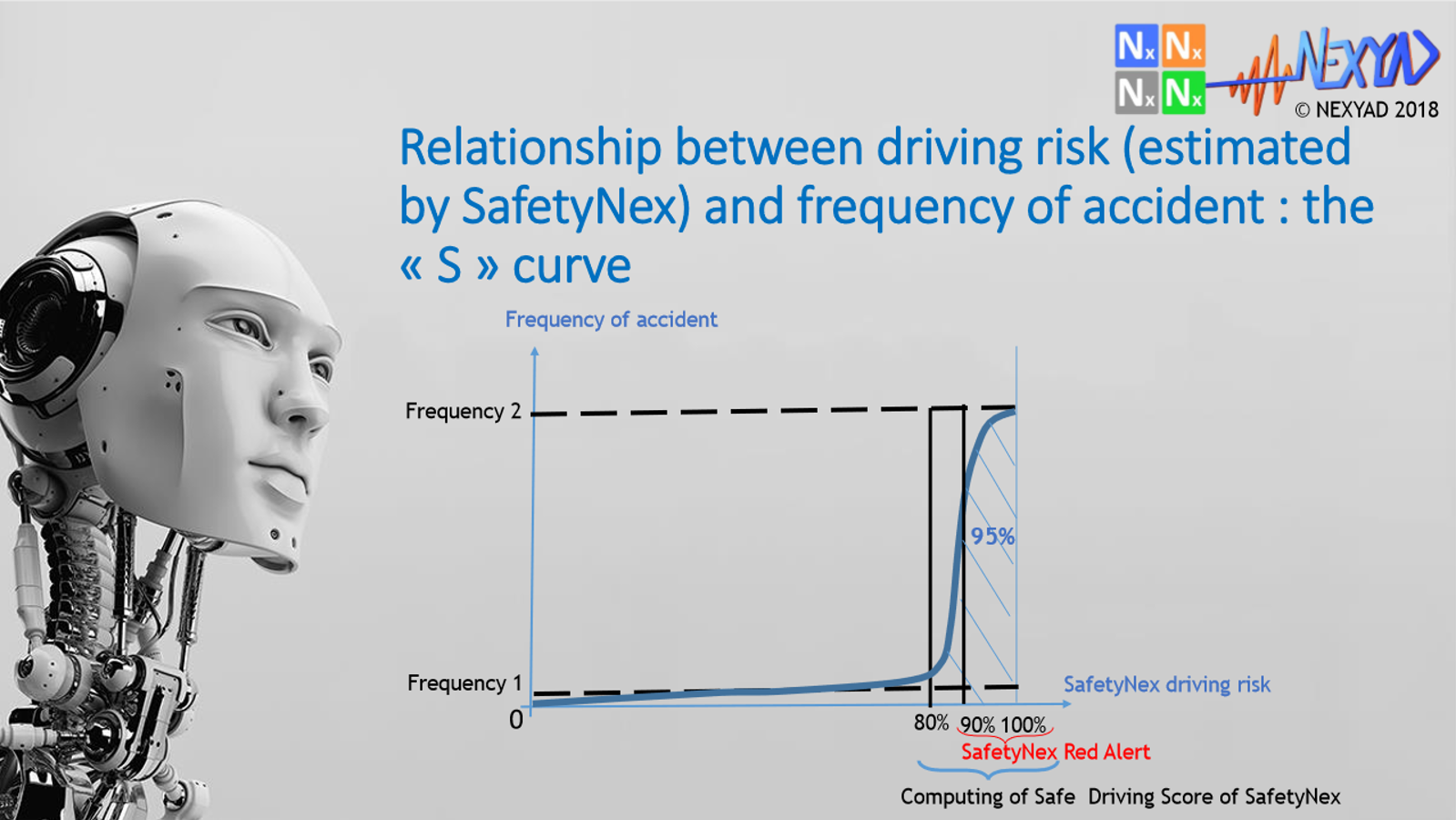
– SafetyNex and the « S » Curve Theory
– Congresses & Events
– ISFM selected Nexyad algorithms
– SafetyNex episode 6 : Five use cases when your eyes or sensors are not enough
– Autonomous Driving Adaptative to situations with SafetyNex
– Broad Range Applications of Real Time Driving Risk Assessment
– Deep Learning for Onboard Applications: Hidden Trap
– SafetyNex and the « S » Curve Theory
NEXYAD is proud to announce that our Artificial Intelligence Algorithmes are used for Autonomous Driving Vehicles French High Tech Startup ISFM (Intelligent Systems for Mobility) selected Nexyad artificial intelligence algorithms for their Milla Smart Shuttle.



Click image to enlarge
Gérard YAHIAOUI, CEO of NEXYAD, participed in a TV show on Mobility TV about the Autonomous Vehicle, where he explained the value of SafetyNex for road safety applied to Autonomous Vehicle. The other guests were Jean-Pierre CARNEVALE, departement director for Ipsos, Abdelkrim DOUFENE from IRT SystemX, and Hervé GROS from SIA (automotive engineers society), the talk show was animated by Patrick ROGER for Auto K7.
Last 25-26 june, SIA and URF jointly organized the first French conference on the autonomous vehicle in order to cross the views of the whole scientific and technical communities : car manufacturers, suppliers, road infrastructures, telecommunications and transport operators in connection with the national and territorial public decision-makers.
200 experts, 4 sectors, a dozen of exhibitors, 38 interventions, keynotes by Anne-Marie Idrac (AV special adviser), Cédric Villani (AI special adviser) and Luc Chatel (President of PFA), 1 round table of industrial leaders and the public sector, or how to draw up the state of the art for the biggest technological change in mobility and transport.
The goal is to accelerate the capacity for innovation everyone to serve everyone, by bringing all stakeholders together under the aegis of the most relevant experts for the autonomous vehicles of tomorrow.
Gerard Yahiaoui, CEO of Nexyad was invited to talk about SafetyNex on a focus about Intelligent Onboard Technologies.


– Benoit Ranini, TNP : Introduction
– Philippe Giry-Deloison : Conseiller municipal de Neuilly sur Seine
– Stéphane Mallard : Artificial Intelligence, Get ready for disruption
– Juliette Girard, Renault & Adrian Pellegrini, Blue DME : Feedback on futuristic car dealership
– Gérard Yahiaoui, Nexyad : Intelligence on board with SafetyNex
– Demo and business dating with TNP Accelerator’s start-ups







ESI Group is a leading innovator in the field of virtual prototyping software and services. A specialist in materials physics, ESI has developed a unique skill to help industrial manufacturers replace physical prototypes with virtual prototypes, enabling them to manufacture, assemble, certify and pre-certify their future products. Coupled with the latest technologies, ESI now wants to anchor virtual prototyping in the broader product performance lifecycle concept, which addresses the operational performance of a product throughout its life cycle, from launch to disposal. The creation of a hybrid twin, based on simulation, physics and data analysis, allows manufacturers to deliver more readable and connected products.
Sigra Technologies was exhibiting its autonomous driving system, its components and services called Deep Einstein. Its products range from drive-by-wire embedded systems to decision-making based on a deep neural network. The company believes that an approach based on deep learning is the best way to handle hard-to-solve cases using traditional algorithms. During the exhibition, Sigra presented its new system for the demonstration of autonomous driving.
StreetDrone is an ambitious UK self-driving startup with a rich automotive, motorsport and entrepreneurial DNA. The streetDrone team is passionate about putting the AV revolution into the hands of the many , not just the few, providing the platform , data management system and functional safety, thereby allowing businesses and institutions to focus on their own development goals without having to worry about the cost and complication of vehicle hardware and systems engineering. StreetDrone is enabling the next generation of engineering to be involved in what is the most exciting area of technology today.
Veoneer is a leading system supplier for ADAS autonomous driving AD and advanced brake control solutions, and a market leader in automotive safety electronics products. With one of the oadest product portfolios in the larket, Veoneer is the forefront of innovation in the current revolution of the automotive industry. Veoneer takes on the challenge of automation and human-machine tion as vehicles become increasly intelligent.

The four algorithms products of Nexyad are now well known by automotive profesionals. Numerus companies worldwide integrated SafetyNex the on board Driving risk assessment in real time, combinable with the three camera-based modules: RoadNex for road detection (edges of road and bitumen free space); ObstaNex for obstacles detection (vehicles and pedestrians); and VisiNex for visibility measurement (fog and heavy rains detection, reliability, distance of visibility, etc.)



This thursday 14th june, TNP, a consulting firm specializing in business transformation, inaugurated its new generation start-up accelerator! The audience follow interesting conference about Artificial Intelligence in Mobility field.
– Benoit Ranini, TNP : Introduction
– Philippe Giry-Deloison : Conseiller municipal de Neuilly sur Seine
– Stéphane Mallard : Artificial Intelligence, Get ready for disruption
– Juliette Girard, Renault & Adrian Pellegrini, Blue DME : Feedback on futuristic car dealership
– Gérard Yahiaoui, Nexyad : Intelligence on board with SafetyNex
– Demo and business dating with TNP Accelerator’s start-ups
Headlines :
– CES 2018 Nexyad Report
– SafetyNex animated video of a use case : The Car Insurer’s Choice
– Nexyad in media
– SafetyNex can bring Artificial Intelligence into Autopilots in respect of ASIL ISO 26262
– Nexyad team wishes you an happy New Year 2018
Headlines :
– SafetyNex animated video of a use case : The Car Insurer’s Choice
– SafetyNex can bring Artificial Intelligence into Autopilots in respect of ASIL ISO 26262
– Nexyad team wishes you an happy New Year 2018
For the second time, NEXYAD went to CES (2018) in Las Vegas (from 9th to 12th of Jan).

 Takeoff at Paris CDG Airport Arrival in Las Vegas
Takeoff at Paris CDG Airport Arrival in Las Vegas
Flight to Vegas from Paris is long but it’s worth the trip for a high-tech startup like NEXYAD.
Of course, for NEXYAD, it is the year of deployment in series for our onboard software modules (Connected car/Car telematics, ADAS, Autopilots, Drive and Car sharing), and especially for SafetyNex (estimation of driving risk 20 times per second), and we had organized for a while 6 meetings per day : ADAS and Telematics OEMs that are already currently integrating SafetyNex, and of course new prospects. Very good new contacts too with qualifies prospects from the USA, Japan, Europe.
We also got some interest for RoadNex that integrates a computer vision based free space detection that works perfectly for large round abouts and intersections. We brought a real time RoadNex implementation into an android smartphone (using the smartphone cam and CPU) and we could do some real time demos that show that RoadNex works in a regular smartphone in real time (for those who care of CPU consumption) :
This year we had a barrow on the LeddarTech booth located at Central Plaza, close to Faurecia, Valeo, Google, Visteon, etc … : LeddarTech is member of the MOV’EO Groupement ADAS, and the whole Groupement was part of the « LeddarTech ecosystem » showcase area.

 Leddar Ecosystem Pavillon at LVCC Groupement ADAS Desk
Leddar Ecosystem Pavillon at LVCC Groupement ADAS Desk
We also used some time slots to do our homeworks on Business Intelligence and visited many boothes including competitors of NEXYAD.
From this visits we could extract some heavy trends : of course, CES deals with quite EVERY subject, then we focused on mobility and what is connected to mobility issues.
First, we must notice that 2018 is THE year of Lidar :
Of course, our partner LeddarTech, but also many other solutions from Startups to Major automotive companies :
 LeddarTech;
LeddarTech;

 Innoviz Velodyne
Innoviz Velodyne

 Quanergy Pioneer
Quanergy Pioneer

 Startup II – VI Startup AEye
Startup II – VI Startup AEye


 Itron (Energy issues) Deloitte (Complete systems and strategy)
Itron (Energy issues) Deloitte (Complete systems and strategy)

 LoRa (IOT) Ericsson (Telecom 5G)
LoRa (IOT) Ericsson (Telecom 5G)
Mobility was a big part of Smart Cities and Urban mobility this year in Las Vegas.
Some soft mobility solutions (electric and connected 2-wheels vehicles) :

 Ujet Genze
Ujet Genze
And of course, autonomous shuttles were numerous this year :

 Navya IBM (Olli)
Navya IBM (Olli)

 Toyota (ePalette) Transdev
Toyota (ePalette) Transdev


SafetyNex by NEXYAD is a Driving Risk Assessment App/API for prevention (accompanied driving, young drivers, individuals, professional drivers, seniors) in every kind of 4 wheels vehicle. SafetyNex is worth for UBI (risk profiles, usage profiles) at the end of every trip; reduction of costs (lower rate of accident and in particular of personal injuries + transformation of some severe personal injuries accidents into material accidents); Detection of behaviour modifications in time and Distraction detection (mobile phone …) : under implementation.
Rémi Bastien interview, the new President of competitive cluster Mov’eo and also President of VEDECOM Institute and VP Automotive Prospective of Renault Group.
For English subtitles click the button on the video
Mov’eo is a Mobility and Automotive R&D competitiveness cluster, which since 2006 has been mobilizing its energies at the service of its members to meet the objectives assigned by the State to competitiveness clusters: to foster the development of collaborative projects between members, to contribute to development in the regions of companies, in particular SMES, and to promote innovation in the sector.
Created in february 2014, VEDECOM is a French Institute for Public-Private Partnership Research and Training dedicated to individual, carbon-free and sustainable mobility.
The new MOV’EO President quote NEXYAD SafetyNex at the beginning of its intervention…
SafetyNex integration in the ASIL 26262.

Complex Automation MUST be ASIL ISO 26262.
Artificial Intelligence CANNOT BE ASIL ISO 26262 (by definition) and acts only on parameters of Complex Automation doing ++/– – variations, never skipping « reflexes actions » (emergency braking, etc), but allowing anticipation speed adaptation to reduce frequency of emergency situations (and then give more margin to reflexes actions and also improve comfort). Maximum acceptable Driving Risk can be changed depending on driving situation in order to set « aggressivity level» of HAV.

Rémi Bastien interview, the new President of competitive cluster Mov’eo and also President of VEDECOM Institute and VP Automotive Prospective of Renault Group.
For English subtitles click the button on the video
Mov’eo is a Mobility and Automotive R&D competitiveness cluster, which since 2006 has been mobilizing its energies at the service of its members to meet the objectives assigned by the State to competitiveness clusters: to foster the development of collaborative projects between members, to contribute to development in the regions of companies, in particular SMES, and to promote innovation in the sector.
Created in february 2014, VEDECOM is a French Institute for Public-Private Partnership Research and Training dedicated to individual, carbon-free and sustainable mobility.
The new MOV’EO President quote NEXYAD SafetyNex at the beginning of its intervention…
Headlines :
– Road accident and driving risk are two different notions
– Nexyad at AutoSens Brussels 2017
– Enova Symposium Paris 2017
– Connected & Self-driving Car Meetup #9
– Academic chair at MOV’EO with INSA Rouen
– Sensor fusion and data fusion with SafetyNex
– SafetyNex : Understanding the Concept of Risk
– NEXYAD : the story
– Navigation Based ADAS : use SafetyNex to build ACC and anticipation (predictive) brake systems
Headlines :
– Road accident and driving risk are two different notions
– Nexyad at AutoSens Brussels 2017
– Connected & Self-driving Car Meetup #9
– Academic chair : effective collaboration between MOV’EO groupement ADAS and INSA Rouen
– Sensor fusion and data fusion with SafetyNex
– SafetyNex : Understanding the Concept of Risk
– Navigation Based ADAS : use SafetyNex to build ACC and anticipation (predictive) brake systems
A lot of professionals that must cope with road safety observe accident through statistics : it seems to be normal to think that safety is low where there are a lot of accidents and that safety is high where there are few accidents.
This reality tends to make people confuse the two notions : risk and accident.
And since you stay at the statistic level, then it works : if 99% of people that played russian roulette more than 50 times have died (accident), then you can say that russian roulette is risky (risk).
Insurance companies, fleet managers, have taken into account those statistics, in order to estimate their future costs, and compute their pricing.
But now, digital connected devices are available at the very individual and local level : telematics (professional devices installed into cars), smartphones, connected car, can estimate the driving behaviour in real time and they know exactly where you drive.
Then, what this new technology brings to risk assessment ? and can you still apply at the individual level the ideas that was set at a population (statistics) level ?
That question was studied in 1969 by an American University Professor that was also a researcher for the company « Insurance of North America », Frank E. BIRD, and a key notion was then used : the « incident » or « near miss accident » or « quasi accident ». It was shown that the risk you take does not lead to accident but to « quasi-accident ». Indeed, even in very risky situations, accident can be avoided most of the time at the very last second ! Frank E. BIRD worked on what was called « The Triangle of Risk » or « Safety Triangle »
Sometimes, you do not have luck … and then you have an accident instead of having a quasi-accident.
 Example of Statitical Relationship in Risk Assessment : from Behaviour to Fatalities
Example of Statitical Relationship in Risk Assessment : from Behaviour to Fatalities
Then accident is the confluence of « risk you take » and « bad luck ». It is interesting to notice that, if you do not study the individual and local (in space and time) level, so if you consider a large population of drivers during a long duration, then « bad luck » automatically disappears… and so risk can be measured by observation of accident. But at the individual and local levels, risk cannot be measure by observing accident.
It is interesting to read about Safety Triangle and then have a clear idea of links between RISK, ACCIDENT, SEVERE PERSONAL INJURIES.
In road Safety concerns, researchers and experts have been working during 50 years on this concept of quasi-accident and they accumulated data and knowledge about this key notion. Let us resume the russian roulette comparison : pulling the trigger is the quasi-accident … and sometimes you die (accident). But even before playing such a « game » you KNOW that it is risky.
The knowledge of risk is represented by a collection of cause-effect relationships.
There is a knowledge-based artificial intelligence system that gathered the knowledge from road safety experts and researchers (that work mainly on road infrastructure) and that is now available in order to assess driving risk in real time : SafetyNex developed by the company NEXYAD. SafetyNex is the « thermometer » of driving risk and it alerts the driver BEFORE the dangerous situation, letting time to slow down and then potentially to avoid accident, to reduce severity (less personal severe injuries), …
Obviously, markets are :
. car insurance (prevention, severity, UBI)
. fleet management (prevention, reduction of costs, fit in regulations and laws)
But even the automotive can take benefit of suche a real time driving risk assessment module :
. intelligent navigation with risk vocal alerts
. automatic triggering of braking for ADAS (if risk too high then slow down)
. driverless cars : giving to the artificial intelligence that drives the car the perception of the risk it takes…
SafetyNex opens the door to a new generation of onboard applications for every field of automotive sector that is concerned with risk and safety.
Read more
AutoSens took place at the AutoWorld Museum in Brussels September 19-21.
To answer the issues of Connected Cars and Autonomous Cars, engineers need first to give eyes, ears and A.I. to future vehicles. Sensors will play this crucial and difficult role of replacing the human senses.
Engineers and sensors providers met for three days of conferences and workshops.
Groupement ADAS was present with Leddartech the lidars canadian company that rose 100 M$ funding, New Imaging Technologies with their unique high dynamic range camera sensors, Intempora that provide famous RT-Maps, and of course Nexyad presented his three camera-based software modules for Road Detection – RoadNex, for Obstacles Detection – ObstaNex, for Visibility Measurement – VisiNex and SafetyNex – the Road Safety system with sensors fusion and data fusion (digital map, accelerometers, GPS, cameras, lidars, radars, ultrasounds, weather data, traffic data, etc.).
New players appeared as Crowdflower or Mighty Ai, they are plateforms that help you process your data or images very quickly by dividing the workload with very many people registered online.

Round Table at ENOVA symposium in Paris, on the subject of self-driving car
(see from left to right)
. Vincent ABADIE, Vice-President Expert Leader Autonomous Vehicle and ADAS, PSA Group
. Jochen LANGHEIM, Vice-President advanced systems R&D programs, ST MICROELECTRONICS
. Jean-François SENCERIN, Autonomous Driving NFI/PFA Program Director
. Gérard YAHIAOUI CEO, NEXYAD
. Guillaume DEVAUCHELLE, Vice-President Innovation, VALEO
. Alain PIPERNO, Expert Safety & Autonomous Vehicle, UTAC
The audience could listen to this experts panel and ask questions about connected and driverless cars.
Journalist : Laurent MEILLAUD
ENOVA, Paris, Porte de Versailles

3 days of exchanges and conviviality at the service of Innovation + Business Meetings driven by THE NEW NEEDS OF CONNECTIVITY.
Read more about the Event
Nexyad was invited to the Connected & Self-driving Car Meetup #9 at Le Square (Renault’s innovation lab in Paris), on september 13.
Thanks to the perfect organisation of Laurent Dunys and Bruno Moncorge.
A large audience listened presentation about vehicles and data security with Nabil Bouzerna of IRT SystemX. Finally, Jean-François Menier, lawyer at Elyos Avocats gave a very interesting wrap-up about the potential responsibility of a driver in the case of a connected / self-driving car accident and of course about driver and passengers safety with SafetyNex App : real time driving risk assessment.

MOV’EO Groupement ADAS built an academic chair with INSA ROUEN (option Intelligent Transportation) on ADAS and driverless cars.
The first course was given by Gérard YAHIAOUI, CEO of NEXYAD, the 13th of September 2017 in Rouen : presentation of key notions (near missed accident, driving risk), and presentation of SafetyNex (real time driving risk assessment) and applications to car insurance, fleet management, ADAS, and driverless cars.

SafetyNex is a real time driving risk assessment system. Of course, Driving Risk makes everyone think of car insurance and fleet management. And it is a natural application (deployment has already started). But it is important to note that Driving Risk is also a key notion for ADAS and Driverless car.

Indeed, Driving Risk happens when there is no adequation between Driving Behaviour and Driving Context. ADAS and Driverless act on Driving Behaviour :
. ADAS modifies Driving Behaviour : braking when the human driver did not, etc …
. Driverless car creates Driving Behaviour : there is still a driver called « artificial intelligence ».
Driving context is measured :
. Map Electronic Horizon
. GPS
. Accelerometers
. Times to collision (front and rear)
. Number of vulnerables around (even on sidewalks)
. Atmospheric visibility / weather condition (fog, pouring rain, etc.)
. X2Car Data Streams (accident, weather alert, construction area, etc.
So you can now imagine that if you have the opportunity to ESTIMATE adequation between Driving Behaviour and Driving Context, then you can build much more relevant ADAS and Driverless Artificial Intelligence (adequation or inadequation).
You may notice that Driving Context is measured through heterogenous sensors and data streams. It brings no difficulty to SafetyNex that uses Fuzzy Sets and Possibility Theory to estimate adequation, givin a Driving output called Driving Risk (that you should want to minimize under constraints of mobility efficiency).
Then SafetyNex is actually a sensor and data fusion system (high level fusion), much more efficient than every fusion systems that you ever developed, because it generates a variable (Driving Risk) that is a KEY NOTION for driving and is EASY TO UNDERSTAND AND USE.
NEXYAD implemented a low cost version with only the first 3 inputs (more than 5,000 road safety rules to cope with the infrastructure dangers …) and is now implementing simple rules to take into account mobile context. Example: « the shorter the time to collision, the higher the risk ». And that’s it ! The knowledge based artificial intelligence of SafetyNex automatically does the fusion with the 5,000 rules. There is no need to « weight » the rules, as possibility theroy allows a fusion with every rule competing with the others … Elegant applied maths to a problem that most engineers describe in a so complicated way that it becomes impossible to solve.
We really encourage ADAS and Driverless engineers to come to us and simply integrates SafetyNex (low CPU consumption, easy real time, etc.) and then get NOW a proven sensor fusion and data fusion system that works. This gives ONE dimension of Driving Systemic Analysis items: Driving Risk, in real time.
Of course, if you do the systemic analysis you will find other dimensions of interest (we let you do that, we’ve done it for ourselves, trace of the military research past of NEXYAD founders).
SafetyNex is now under implementation by big ADAS OEM companies. Series deployment will start in 2018. We will be glad to help you being a part of it.
SafetyNex App is a real time driving risk assessment. We present below 3 videos to explain as simply as possible the concept of driving risk.
Luck doesn’t change the risk that the driver takes. It means that risk taken by the « lucky risky driver » is exactly the same than risk taken by the « unlucky risky driver ». It is possible then to detect risky drivers before they have accident (anticipation of costs). Once detected, it is possible to train them (prevention program).
Because SafetyNex driving risk assessment is done in real time, it is possible to alert the driver (when risk is higher than an acceptable value), and if driver slows down, then risk never rises at the red level. It is an onboard prevention system (ADAS).
Observation of accidents on a short period of time (3 months for instance) may not show any difference between « cautious driver » and « lucky risky driver » (both of them may not have accident). It is a big problem for UBI, and SafetyNex brings the solution as it anticipates accident (sooner or later the « lucky risky driver » will have a severe accident).
More info : http://www.safetynex.net
All you have to know about the french High Tech company.
NEXYAD is a « fake startup » (much older than it seems ^^) set up in 1995 by maths research engineers (Pierre DA SILVA DIAS & Gérard YAHIAOUI + other shareholder : researchers, finance executives, engineers). Founders came from military research (anti-tank missiles), with a strong culture of computer vision, machine Learning, artificial intelligence, signal theoy and processing, stats and data analysis.
During years we were the extended maths team of famous big firms in many fields : defence, automotive, banking, insurance, energy, cosmetics, agri-food, glass, railways, … Customers were research departments first, and then product and marketing departments, sales departments, industrial labs, manufactures, actuaries, etc.
In the automotive sector, we’ve been involved in a lot of different high level maths works such as :
. production/manufacture (work for PSA Group, Charleville),
. industrial Lab (work for PSA Group – Belchamp,TOYOTA Europe – Brussels, Robert BOSCH GmbH, Bühlertal, VALEO, La verrière – SAINT GOBAIN, … etc.)
. research & development for PSA Group, RENAULT, NISSAN, IEE, DAIMLER, FAURECIA, LE LAB (PSA RENAULT), on perception by camera, radar, capacitive sensors, ultrasound, infrared, etc … , vehicle dynamics (active control), sensorial analysis (touch smell perception of texture by vision), human factor analysis, detection of passengers on seats, odor gas sensors, artificial intelligence, epidemiologic analysis (pollution, particles, …), etc.

Imagine a robotized car that would slow down automatically when approaching a tiny curve, or an intersection or a priority, of a stop sign, etc … if needed (i.e. if and only if the current speed and acceleration of the car is not appropriate to the driving context). Sounds interesting ?
It would be then « smooth anticipation braking » (from 0.1 to 0.3 g) instead of « emergency braking » (so easier to do and not that disturbing for driver and passengers comfort in the car). Doing this, the car dramatically decreases the probability to be kept in a dangerous situation and it let much more margin to emergency brake if still needed.
Finally, it would mean that the car follows road traffic code plus safety rules (anticipation).
This is easy to achieve using NEXYAD real time driving risk assessment module SafetyNex : SafetyNex reads « Electronic Horizon » (reading POIs and decoding shape and dimensions of the infrastructure ahead), « GPS« , « accelerometers« , and can accept additional inputs such as « time to collision« , « size of free space« , « position in the lane« , « atmospheric visibility« , alert data streams (weather, accident, traffic, …). All those heterogenous data are used (data fusion) to estimate driving risk in real time : Driving Risk (t)
Then everytime that Driving Risk(t) comes higher than an acceptable threshold value, the robotized car slightly slows down … and that’s it !
SafetyNex is the result of 15 years of collaborative research and it works.
Markets : Car insurance and fleet managers (for real time alert and risk profiles recording), ADAS (for automatic predictive/anticipation brake), and Driverless car (Automated car that follows Road Traffic Code).
SafetyNex is Under deployment, please feel free to try it and put it into your own products (available as an API).
Keywords : Adaptive Cruise Control, ACC, Intelligent ACC, Intelligent Cruise Control, navigation-based, navigation-based ADAS, NB ADAS, ADAS, Advances Driver Assistance Systems, Anticipation brake, Predictive Brake, SafetyNex, Risk, Driving Risk, Real time driving risk assessment, road traffic code, SafetyNex, electronic horizon, GPS, accelerometers, time to collision, free space, size of free space, position in the lane, lane departure, visibility, atmospheric visibility, data stream, weather, accident, traffic, data fusion,…
Round Table at ENOVA symposium in Paris, on the subject of self-driving car
(see from left to right)
. Vincent ABADIE, Vice-President Expert Leader Autonomous Vehicle and ADAS, PSA Group
. Jochen LANGHEIM, Vice-President advanced systems R&D programs, ST MICROELECTRONICS
. Jean-François SENCERIN, Autonomous Driving NFI/PFA Program Director
. Gérard YAHIAOUI CEO, NEXYAD
. Guillaume DEVAUCHELLE, Vice-President Innovation, VALEO
. Alain PIPERNO, Expert Safety & Autonomous Vehicle, UTAC
The audience could listen to this experts panel and ask questions about connected and driverless cars.
Journalist : Laurent MEILLAUD
ENOVA, Paris, Porte de Versailles
3 days of exchanges and conviviality at the service of Innovation + Business Meetings driven by THE NEW NEEDS OF CONNECTIVITY.
Read more about the Event
Headlines :
– Nexyad and Groupement ADAS at Automotive Symposium
– New Papers of Nexyad on advantages of SafetyNex
– Challenge Open Innovation Renault
– Nexyad at Imagine Mobility Forum 2017
– Nexyad presenting the driving risk solution SafetyNex to Eurapco
– Conference at “Cercle LAB” Paris
– HERE invited NEXYAD to Le Mans
– Meeting HappYnnov at Chamber of Commerce Versailles-Yvelines
– Nexyad booth to la fête du THD at Acome in Mortain (Normandy)
– NEXYAD in Media
Headlines :
– Nexyad and Groupement ADAS at Automotive Symposium
– New Papers of Nexyad on advantages of SafetyNex
– Challenge Open Innovation Renault
– Nexyad at Imagine Mobility Forum 2017
– Nexyad presenting the driving risk solution SafetyNex to Eurapco
– Conference at « Cercle LAB » Paris
– HERE invited NEXYAD to Le Mans
– Meeting HappYnnov at Chamber of Commerce Versailles-Yvelines
– Nexyad booth to la fête du THD at Acome in Mortain (Normandy)

June 20, 21 and 22th 2017 saw the big Automotive Symposium in Stuttgart, land of Daimler, Porsche, Robert Bosch GmbH.
We present our modules based on Artifical Vision and A.I. for ADAS, Connected Cars and Driverless.
This year Groupement ADAS is represented by Intempora, New Imaging Technologies, Sherpa Engineering and Nexyad.

Nexyad booth at Hall 2C
This year, we made a focus on three big engineering companies in Europe. No surprise two are germans and one is Austrian. Those companies are worldwide with offices and plants in other continents. They work for car manufacturers and suppliers.
FEV is an internationally recognised development service provider for drive and vehicle technologies, and an innovative supplier of cutting-edge software and testing solutions. Thanks to the synergy of these complementary activities, FEV is the perfect partner for providing test fields, measuring equipment and software solutions that fit with the needs of the automobile market. As a powertrain development specialist, it helps to make the development process more efficient and to transfer significant process steps from the road to the test rig and to the desktop, thanks to its leading-edge methodologies and tools. FEV’s competencies also include powertrain electronic control systems and hydro-electric engine concepts that address future emission and fuel economy standards.
Employing over 6500 members of staff, IAV is one of the world’s leading providers of engineering services to the automotive industry. The company has been developing innovative concepts and technologies for future vehicles for more than 30 years. Core competencies include production-ready solutions in all fields of electronics, powertrain and vehicle development. Clients include all of the world’s premier automobile manufacturers and suppliers. In addition to development centres in Berlin, Gifhorn and Chemnitz/Stollberg, IAV operates from other locations in Germany, Europe and Asia, as well as in North and South America.
AVL is the world’s largest independent company developing IC engine powertrains along with the associated instrumentation and test systems. It develops and improves all kinds of powertrain systems, including alternative and hybrid systems, and is an effective partner to the engine and automotive industry. In addition, AVL develops and markets all simulation methods and easy-to-use software tools necessary for development work. The company’s unique power derives from the systematic netting of single simulation results to integrated, multidimensional simulation platforms on the basis of its deep engineering expertise. Its Engine Instrumentation and Tests Systems business area produces all instruments and systems required for engine and vehicle testing.

I – INTRODUCTION
NEXYAD has been developing the smartphonte application SafetyNex which estimates the risk of driving in real time [1]. SafetyNex is both a driver assistance system (ADAS), which alerts the driver (vocal alert) before danger (When the risk increases too much), and a telematics system that records risk profiles and usage profiles.
Warning before the danger gives the driver time to slow down and avoid the accident. Road Safety studies show that SafetyNex can reduce the number of accidents by 20% [2]. This simple functionality is of interest of car insurers, fleet managers, and to car manufacturers.
SafetyNex also rewards the driver with cups (gold, silver, bronze) that can be transformed into money incentive (vouchers, etc.) so that the safe drivers stil have a daily interest to go on using SafetyNex. Indeed, tools that are not used over a period of time rarely have a real effect on the accidentology. SafetyNex is therefore distinguished from other products, on the one hand by its real time and driving assistance, but also for its « reward » side. SafetyNex informs the driver In real time when the risk exceeds a threshold of danger, than one can say that SafetyNex gives the risk in the hands of the driver first. The driver is in control of his/her risk.
Then SafetyNex distinguishes from all telematics products that ultimately provide information to the insurer or fleet manager, but not to the driver who feels rightly spied on.
Risk and usage profiles [3] are forwarded to managers who have an interest in minimizing risk and the number of accidents. This paper presents a simple way to interpret the risk profiles constructed by SafetyNex.
Depuis 1996, les assureurs français se sont engagés auprès de l’Etat à mener des actions de prévention routière. Ils doivent consacrer ainsi chaque année à ce type d’action de prévention 0,5% du montant des cotisations de responsabilité civile automobile perçues.
Traditionnellement, les actions menées sont des opérations de sensibilisation dans les écoles, conseils pratiques en vidéo, pistes de conduite avec moniteur, simulateurs de conduite, voiture tonneau, etc… Ces actions doivent avoir un effet à long terme sur la réduction du nombre d’accidents de la route. Récemment, les applications smartphone sont aussi utilisées, toujours en opération de sensibilisation.
C’est dans le cadre de cette entrée du numérique, dans l’action obligatoire de prévention, que SafetyNex représente une avancée très intéressante pour les assureurs automobile. En effet, SafetyNex évite les dangers liés à une vitesse inadaptée aux difficultés de l’infrastructure, ce qui correspond à 75% des accidents de la route. SafetyNex est actuellement le seul système permettant de prévenir en temps réel et de façon prédictive le conducteur afin qu’il ralentisse pour éviter l’accident. SafetyNex répond ainsi aux critères des actions de prévention à mettre en œuvre, si bien qu’il est possible pour un assureur de déployer massivement SafetyNex sans aucune dépense supplémentaire. C’est une opportunité unique de réaliser une action de prévention efficace, tout en préparant la transition digitale du métier d’assurance.


Interview of Gérard Yahiaoui, Nexyad CEO

SafetyNex is a real time driving risk assessment smartphone App that warns (vocal alert) the driver before danger, letting time to slow down and avoid accident, and that records risk profiles and usage profiles on the NEXYAD cloud.
Road Safety studies show that SafetyNex can reduce by 20% accident rate (ref)
This smartphone App is disruptive, as it lets insurance companies and fleet management teams decrease the number of accident before they try any new digital pricing or strategy.
Of course, UBI is easy with SafetyNex because :
. usage is completely described
. risk profiles give : risk that the driver agrees to take, extertise level of the driver, lacks of anticipation of the driver
This conference at Cercle LAB (Laboratoire Assurance Banque) in Paris was very interesting and led to questions and new contacts with insurance companies (SafetyNex is under deployment and testing worldwide).

Gérard Yahiaoui presenting SafetyNex

Le Mans 24H Alpine run at night

Heads of Nexyad: Gérard Yahiaoui and Pierre Da Silva Dias

After the introduction of Gérard Bachelier – President of the CCI, Stéphane Masson – development manager of the Estaca presented the book « Mobility of the Future ». A round table moderated by Stéphane Parpinelli brought together Philippe Orvain – Vice President of Mov’eo for the IDF; Luc Marbach – Managing Director of Vedecom and Ghislain Delabie Mobility Connector for OuiShare. Dominique Levent, Director of the Institute for Sustainable Mobility for Renault, presented the latest advances in the manufacturer’s innovation strategy, before Lucie Ruchon, Assistant to the Delegate Director of Ile-de-France of Engie, explains the axes of innovation of the energy group.
Three Startups of the Yvelines presented their product :
. SafetyNex, the road safety App for Nexyad
. Electrical scooters for Pink Mobility
. A solution of shared mobility by Ecov


HappYnnov Round Table and presentation by Nexyad of SafetyNex App

Nexyad through these products such as the embedded and connected software SafetyNex, , helps to make the road safer for its users and others.
Acome is a manufacturer of cables, fiber optics and synthetic tubes. Specialist and market leader in networks. It is the leading European manufacturer of environmentally friendly and halogen-free high-tech automotive wires and cables approved by European manufacturers and its markets are expected to continue to grow rapidly with the advent of the connected vehicle.

Gérard Feldzer and Gérard Yahiaoui
On June 13th, RENAULT entrusted the MOV’EO competitiveness cluster with the organization of a new Open Innovation Challenge on the theme « Connectivity and services ».
Through this initiative, RENAULT wishes to detect new proposals from SMEs and innovative startups on these themes, in order to develop collaborations on the most relevant projects.
Among the selected startups were Nexyad that presented SafetyNex, and the « Groupement ADAS » cluster of 10 companies working in the field of ADAS and autonomous vehicle.
La CCI Versailles-Yvelines, via sa communauté de l’innovation Open’Ynnov, avec ses partenaires – l’école d’ingénieurs l’Estaca, le pôle de compétitivité Mov’eo, l’Institut Vedecom, le Ravi, le constructeur Renault et Engie – proposait le 7 juin une rencontre Happ’Ynnov Spécial « Les Mobilités du Futur ».
Après l’introduction de Gérard Bachelier – Président de la CCI, Stéphane Masson – responsable développement de l’Estaca présentait le livre « Mobilité du Futur ». Une table ronde animé par Stéphane Parpinelli réunissait Philippe Orvain – Vice Président de Mov’eo pour l’IDF; Luc Marbach – Directeur Général de Vedecom et Ghislain Delabie Connecteur Mobilité pour OuiShare. Puis, Dominique Levent Directrice de l’Institut de la Mobilité Durable pour Renault présentait les dernières avancées de la stratégie d’innovation du constructeur, avant que Lucie Ruchon, Adjointe au Directeur Délégué Ile-de-France de Engie explique les axes d’innovations de l’énergéticien.
Trois Startups des Yvelines pitchaient leur produit :
. SafetyNex, l’App de sécurité routière pour Nexyad
. Des scooters électriques pour Pink Mobility
. Une solution de mobilité partagée par Ecov
HappYnnov Table Ronde & Pitch de Nexyad pour l’App SafetyNex
Very interesting conference on Machine Learning and Deep Learning.
SNCF RESEAUX welcomed a large audience last tuesday 28th march in Saint Denis.
French experts of A.I. field were introduced by Claude Solard SNCF réseau Chief Operating Officer and Jean-Jacques Thomas Director of Innovation.
Christophe Garcia, Full professor at INSA Lyon, deputy director of the LIRIS laboratory, gave an introduction to Neural Networks and Artificial Intelligence and answered to the audience’s questions.
Then, Gérard Yahiaoui, CEO of Nexyad, Vice President of the MOV’EO Cluster, explained the Criteria for use and Methodology for implementation: the methodology AGENDA.

Gérard Yahiaoui CEO of Nexyad
From CEA List, Jean-Marc Philippe presented « Tools of the Network to the Optimized System ». The conference continued with a roundtable about the SNCF Cafeine Project or how to go from the industrial need to the applied solutions in SNCF Réseau; animated by Alain Rivero, SNCF Réseau Director of Cafeine Project; Xavier Roy, Head of Innovation of ITNovem; Michel Paindavoine, co-founder of Global Sensing Technologies and professor at University of Bourgogne; and Jean-Jacques Thomas Director of innovation of SNCF Réseau.
The CAFEINE Project proposes to use the Artificial Neural Networks to detect the defects of pantographs on moving trains, and also to read the number of each wagons, oars and containers.
Another roundtable was organized about Startups and A.I. with Kunthirvy Collin-Dy, Head of relationships with Startups of SNCF Réseau Robot Lab; and Yannick Gérard, Head of Project of DAVI.
Patrick Bastard, Director of Driving Assistance Systems engineering of Renault, ended the conference with a presentation on an opening to other fields of application : vehicles electrification, ADAS and autonomous driving.

From the left : Jean-Marc Philippe, Patrick Bastard et Christophe Garcia
La première édition des ADAS Morning a eu lieu le 18 octobre 2016 à la Chambre de Commerce et d’Industrie de Paris. Cette rencontre était organisée conjointement par le pôle de compétitivité Movéo et le Groupement ADAS et avait pour thème la Sécurité Routière.
Les interventions étaient réparties en trois parties :
LES ENJEUX
Les enjeux humains
ADAS et véhicules autonomes quels enjeux pour les personnes ayant des besoins spécifiques – Claude Dumas – CEREMH
Les chiffres de l’insécurité routière : Christophe Ramond – Prévention Routière
ADAS et facteurs humains : Apports des sciences cognitives- Franck Techer – IFFSTAR
Les enjeux économiques
Risque routier lié au travail: quel coût pour les entreprises ? Patrick Oberto – Promotion et Suivi de la Sécurité Routière en Entreprise
ADAS et TIC, outils de disruption de la chaîne assurancielle : Philippe Caton – COVEA
Diminution de la sinistralité responsable : Jean Zermati – ORANGE
LES SOLUTIONS ACTUELLES
Les systèmes de sécurité active et les ADAS
Evolution technique de l’accidentologie et de la problématique d’estimation du gain des ADAS : Philippe Chrétien – CEESAR
Nouvelles mobilités et sécurité routière : quelles évolutions pour l’infrastructure ? : Eric Violette – CEREMA
Assistant nomade à la conduite sûre et responsable : Gérard Yahiaoui – NEXYAD
LES PERSPECTIVES
Le défi de la sécurité routière : l’intégration des facteurs humains dans les cas d’usages d’expérimentation des ADAS : Stéphane Barbier – TRANSPOLIS
Véhicule autonome, une révolution de la mobilité – Rémi BASTIEN – RENAULT
Rémi Bastien a conclu cette session et a repris quelques points des différentes interventions.

Gérard Yahiaoui P-DG de Nexyad présentant l’App SafetyNex

C’est Rémi Bastien Directeur du Véhicule Autonome chez Renault qui a conclu l’ADAS Morning

8h30: Accueil à la CCIP 2 rue de Viarmes, Paris 1er.
INTERVENANTS :
Claude Dumas – CEREMH
Christophe Ramond – Prévention Routière
Franck Techer – IFFSTAR
Patrick Oberto – Promotion et Suivi de la Sécurité Routière en Entreprise
Philippe Caton – COVEA
Jean Zermati – ORANGE
Philippe Chrétien – CEESAR
Eric Violette – CEREMA
Gérard Yahiaoui – NEXYAD
Stéphane Barbier – TRANSPOLIS
Rémi BASTIEN – RENAULT
12h: Cocktail
Avec les sociétés : Car&D, GlobalSensing Technologies, Intempora, Nexyad, Nomadic Solutions, Sherpa Engineering & Transpolis
Renault R-Link : TomTom HD Traffic and Coyote Series
R-Link has TomTom navigation including IQ Routes technology. This calculates the ideal itinerary based on a statistical analysis of journey times during the six previous months, taking the day of the week and time of day into account.
It has LIVE services including:
•HD Traffic: the market’s best traffic information service, including an analysis of traffic flow by cross-referencing different sources of information for sections of road of just a few dozen metres in length. For any given itinerary, HD Traffic will optimise the motorist’s journey in order to avoid time loss or save fuel. It also provides precise information about the estimated arrival time as soon as the motorist sets off.
•TomTom Places: an online search facility in real time to locate a variety of features and services.
•5-day weather forecasts.
•Hazard warnings: depending on local legislation.
R-Link also has the Coyote Series (depending on market) driver aid application. This indicates hazardous zones thanks to real-time input from other users. Such zones may or may not include fixed speed checks. Coyote Series also warns of traffic incidents (accidents, items on the road, etc.) to improve everyday road safety by enabling the driver to anticipate the presence of slower-moving vehicles.
Renault R-Link Store
Renault’s aim is to make this a benchmark catalogue for automotive applications.
The strength of Renault R-Link lies in the fact that it proposes a store of applications designed for automotive use, without the functional or ergonomic- related shortcomings inherent in smartphones. R-Link Store is the first automotive application store for in-car use. The launches of New Clio and ZOE will coincide with the availability of an Introductory Pack of four pre-installed applications to enable owners to familiarise themselves with the connectivity made possible by R-Link. The free, pre-installed apps will be: e-mail, Weather, Renault Assistance and Renault R-Link Tweet, plus the LIVE services associated with the TomTom and Coyote Series functions (depending on market). The system is fully independent and there is no need to use a phone to access the available services and applications.
Instead, it is possible to consult or download a variety of services directly from the car or from a personal computer (via ‘My Renault’ where available). There are currently some 20 applications available via R-Link Store, and this choice is poised to expand very quickly as the system is extended to other vehicles of the range.
To read more : http://myrenaultzoe.com/index.php/zoe-description/r-link-multimedia-system/r-link-applications-and-app-store/
Summary :
– OVERVIEW OF ITS WORLD CONGRESS IN BORDEAUX
– USING NEXYAD ADAS MODULES FOR AUTONOMOUS VEHICLE AND SAFETY/RISK ESTIMATION
– REAL TIME ONBOARD RISK ESTIMATION CORRELATED WITH ROAD ACCIDENT
NEXYAD has been starting the development of a data base for artificial vision-based ADAS test and validation.
This data base will be relevant and unique because it is fully decribed in two ways :
. reality : position of road and obstacles
. driving situation (i.e. curve in a foggy weather with pedestrian crossing, …) using the methology AGENDA.
To read more :
– « Methodology for ADAS validation: Potential Contribution of other Scientific Fields which have already answered the Same Questions »,
G. Yahiaoui, P. Da Silva Dias, proceedings of the 3rd CESA Automotive Electronics Congress May 2014 Paris, Lecture Notes in Mobility,
ENERGY CONSUMPTION AND AUTONOMOUS DRIVING, Jochen Langheim Ed, Springer, pp 133-138.
– « Validation of Advanced Driving Assistance Systems », G. Yahiaoui, N. du Lac, SafetyWeek congress, Aschaffenburg, May 2015.
Business details :
A part of this data base will be soon available for free on the internet, to the worldwide ADAS and Autonomous
vehicle community (labos and firms).
If you wish to receive the link as soon as it is available, click HERE and fill the registration form.
(Free access to the NEXYAD Artificial Vision-based ADAS Validation Database)
The complete data base should be available soon through an annual membership.
For more information : contact NEXYAD Olivier BENEL +33 139 04 13 60

From 5 to 9 October, the ITS World Congress held in Bordeaux.
It is the world’s largest gathering on the subject of intelligent transport systems and numerous corporations and government agencies were present to discuss new technologies, communication and robotics which every day are revolutionizing commercial road transport, individual and collective.
From our point of view, three main domains distinguished themselves which are however increasingly closely intertwined: the vehicle, the infrastructure and information.
The most spectacular of them represented by the many autonomous vehicles that lined the stands or went in demo mode near the fairgrounds.
We noted a trend of convergence between the connected vehicle on one hand and adas in the other hand, all autonomous vehicles were also connected vehicles and communicating vehicles : car to x and x to car (especially radio link with fires and road signs.)
The AKKA link in city car without driver of the French IT company has rolled around the lake so the city. This electric car is the result of a call for projects from the agency for the development and innovation of the Aquitaine region and it uses open data from the city of Bordeaux and its neighbourhoods.

From Renault, we saw the Next Two a piloted car remotely by a tablet. It parked all alone with no one behind the wheel. We liked particulary that this functionality avoids a walking pedestrian crossing in front of the car. Then it returns to the starting point when you recall it, always from the tablet.
Moveo-Groupement ADAS is a cluster of 8 french SME’s that put their competence in common to develop autonomous car. They showed on their booth the demo car that has been made for ENSIAME University of Valenciennes, entirely robotised by FH Electronics. Nexyad designed the eyes of this car with his vision-based road detection system RoadNex that runs on the framework RT-Maps from Intempora. The other companies showed demos, products, and competence on detection, pattern recognition, eco-driving measurement, human factors, advanced engineering for autonomous cars.

PSA Peugeot Citröen showed on its stand several R & D results in progress (for example, a work in collaboration with Nexyad : a plateform for simulation Car Easy Apps or CASA) Several autonomous vehicles rolled in urban circuit.
VeDeCoM presented four autonomous vehicles driving around the lake near the Congress place on a 7km open track. These demonstrators, which are dual-mode vehicles (manual driving and driving delegation level 4), combine the French expertise, derived from the public-private partnership research on the autonomous vehicle. We appreciated a lot the capacity of those demo cars to pass all the difficulties of the city, including roundabouts with traffic which are one of the key problems of the automated driving.

Smartlane opens up your data silos and allows you to create a secure, accessible and integrated data hub. In this way your own data are carefully combined with external sources in order to provide comprehensive information value.
Valeo came also with an autonomous vehicle in demo on the road of Bordeaux : the Valeo Cruiser4U fitted with the valeo laser scanner and the valeo camera that uses Mobileye processor. This car was designed to scale in urban and suburban driving, it can change lane, reaching 130km/h.

Nexyad was present on two booth at ITS. « Moveo Groupement ADAS » one showing innovative technologies of perception with a suite of software modules RoadNex, single camera based detection of sides of the road and detection of the surface of the road ; ObstaNex, single camera based detection of obstacles on the road and on the sides of the road ; VisiNex onboard, camera based measurement of the visibility ; and SafetyNex, a world unique tool to estimate the risk/safe in driving 100% correlated with accidentology. Nexyad was also present on the PSA Peugeot Citröen booth with the FUI, Moveo labelised, research program CASA.
Citilog showed his incidents detection system on motorways, and management of intersections in cities based on proprietary camera technology. Citilog was on Moveo Groupement ITS Infra booth with other SME’s.

ST Microelectronics showcased next generation technologies for automotive applications, with a range of solutions including telematics, positioning, ADAS, digital radio, and sensors. We discovered his partner AutoTalks the pioneer and leader of the V2X Technology.
TomTom makes his navigation more and more precise and efficient. They have fully mapped in 3D the roads of Germany to render, in the future, automated driving possible, and they will do the rest of Europe before the world, they say.
Navya is an electric shuttle 100% French without driver that moves at low speed through an embedded robot and multi-sensor system. Designed for urban mobility, first for closed sites and latter for the first or the last kilometer of a journey, it can accommodate up to twenty passengers safely. Demo on a course in the city of Bordeaux.
Atlatec makes ground reality which is very valuable for validation of ADAS. Put their box in your car, calibrate it and run. Then it stores a mass of data and the software creates automatically high precision 3D maps of the environment with high resolution top view of the road.
Here presented high definition maps combined with cloud technology. The leader of navigation brings to the driver, real-time location experiences through of a broad range of connected devices from smartphones, tablets to wearables and vehicles; and always more informations like road surface horizon (slope/cant track).

On the ITS World Congress we could feel very clearly that car manufacturers, Tier One and Tier Two Companies, stakeholders in mobility, in general, (including many SMEs) have heavily invested on ADAS and autonomous vehicles. It leads to a multitude of very advanced exhibitions, and present or future availability of high performance sensors at low costs, with associated signal processing, which are also mature.
Nexyad tries Autonomous Vehicle by VeDeCom at ITS World in Bordeaux
by NEXYAD
INTRODUCTION
The company NEXYAD developped software modules for Advanced Driver Assistance Systems :
. RoadNex (Road detection) : lane detection, detection of the borderlines of drivable area in the lane, detection of the surface of drivable area in the lane.
Sensor : camera (color)
. ObstaNex (Obstacles detection) : obstacles detection (if they have a vertical dimension or – inclusive – if they have their own movement)
Sensor : camera (N&B or color), accel, gyro
. VisiNex onboard (weather visibility measurement) : visibility measurement (quality and distance)
Sensor : camera
. SafetyNex : onboard road safety / risk estimation
Sensor : navigation map, gps, accel or car speed
Those modules were made to develop very efficient ADAS.
There are many ways of comining those modules, depending on the function that should be developped.
LANE KEEPING AND AUTOMATIC BRAKING : FOR CAR MANUFACTURERS AND TIER ONE COMPANIES
For this function, modules may be integrated in a rather complex way :

Such an application needs to know where it works and where it doesn’t work (reliability). For that, VisiNex helps because it measures weather visibility and the nit is possible to know in which context artificial vision algorithms are efficient or not. It is also possible to switch setting parameters of artificial vision based algorithms using visibility characteristics, in order to expand the range of good performance of the global system (this is robustness).
NEXYAD applies a validation methodology called AGENDA (see papers in CESA Automotive 2014 in Paris and in SATETYWEEK 2015 in Aschaffenburg). This methodology is the onlt approach that allows to know what the system is supposed to do in a functional point of view, with measurable characterisctics of road scenes.
NEXYAD of course uses the NEXYAD ADAS validation data base : a part of this validation data base for artificial vision-based ADAS will be soon online for free (usable by every researcher or engineer in the world).
Note : the AGENDA methodology also provides a method to measure the similarity of a road scene in the validation data base anda current road scene : this is applied to estimate a confidence score.
SAFETY / RISK ESTIMATION FOR INSURANCE COMPANIES
SafetyNex measures the adequation of driving to road infrastructure characteristics.
It generates then a risk if the driver goes too fast when approaching a crossing road or a dangerous curve.
Of course, a poor visibility should lead the driver to drive slower.
In addition, there could be auxiliary inputs that would tell SafetyNex if there are obstacles on the pathway :

This scheme is the same than the previous one but the outputs of RoadNex and ObstaNex are used INSIDE the scheme (they don’t provide an output of the global scheme).
DEMOS OF NEXYAD MODULES
REFERENCES
Validation of Advanced Driving Assistance Systems by Gérard Yahiaoui & Nicolas Du Lac
CESA Paper by Gérard Yahiaoui & Pierre Da Silva Dias
Road detection for ADAS and autonomous vehicle
Using the NEXYAD road detection (RoadNex) to make obstacles detection more robust
Real Time Onboard Risk Estimation Correlated with Road Accident
Visibility Measurement for ADAS and Autonomous Vehicle
by NEXYAD
INTRODUCTION
Measuring road safety in the context experienced by the driver is a topic of interest for several activities :
. car manufacturers, who can inform the driver of potential dangers
. autonomous vehicle developers who need to prove that the driving actually minimizes risk of accident.
. fleet managers and insurance companies who wish to measure the risk taken by drivers (how they drive)
. managers of road infrastructure that alway change infrastructure to adapt and lower the risk of accident
The company NEXYAD has been developing since 2001 an embedded onboard module, SafetyNex, to
estimate in real time the risk of accident.
PRECONCEIVED IDEAS ABOUT ROAD ACCIDENTS AND DRIVING STYLE
Many trials have been completed or in progress, particularly by insurance companies and fleet managers,
In order to measure what is called the « driving style ».
The assumption is that some drivers are more « nervous » than others, and that this has an impact on the accident: those that speed up or slow down quite often brutally would be « bad drivers » while those with a quieter driving style would be « good » drivers.
This assumption is contradicted by the facts. There is no statistical connection between the driving style and
the accident.
Formally, one can easily fancy very well that if a driver operates very quietly, without slowing, without
accelerating at 30 km / h, and if this driver passes through a stop road sign without braking … then the driving style is quiet but very accident-prone.
We then see that beyond the possible statistical link (that doesn’t exist), there can be no relationship of cause and effect.
All experiments that were conducted led to this result.
All those that will be conducted, based on more or less intelligent thresholding of the acceleration values are doomed to failure.
Do not confuse eco-driving and safe driving.
Driving style cannot be interpreted itself without context description :
. infrastructure shape and characteristic, on which the vehicle is traveling
. traffic (presence of other road users)
. weather conditions (visibility, grip, …)
. level of driver vigilance (distraction, drowsiness, sleep …)
NEXYAD has developed a scalable solution capable of taking into account all these factors.
SafetyNex is therefore able to estimate the risk of driving using all those variables.
Version 2.1 of SafetyNex, under deployment, takes into account the adequacy of driving style with the type and shape of infrastructure (breaks on route characteristics, turns, pedestrian crossings, intersections …).
This version has been intentionally reduced to « driving style vs infratructure characteristics », because it already gives a 90% correlation with accident and because this version is deployable at very low cost:
. on smart phone
. electronic device (developed by an automotive tier one company), without using the OBD socket)
CORRELATION OF RISK OF ACCIDENT ESTIMATED BY SafetyNex V2.1 AND ACCIDENT
NEXYAD participated in collaborative research programs since 2001, and worked then with experts from the road equipment.
In particular, SARI research program led to detecting what experts call « Break on the route characteristics ». For example, a turn with a big curve may be a danger when it arrives behind a long straight line, while the same curve will not be dangerous bend on a mountain road.
NEXYAD published a paper at the conference on road safety May 6, 2010 in Paris: PRAC 2010
Risk Prevention and Save The Conduct, Session 1 Characterization of road risk vs. infrastructure
« Evaluation du risque routier pour l’aide à la conduite ou le diagnostic de l’infrastructure », Johann Brunet, Pierre Da Silva Dias, Gérard Yahiaoui, PRAC 2010, Mai 2010, Paris.
The work that led to this publication were integrated in the available product SafetyNex. This means that by construction, the risk estimated by SafetyNex is correlated to the accident. This is true by construction, and NEXYAD conducted tests on roads, downtown, on motorways in urban areas, etc … and was able to validate this result.
PRINCIPLE OF SafetyNex V2.1
SafetyNet is a knowledge based system (expert system) which applies rules of the experts of the equipment.
These rules are stored in a rules data base in a mathematical form that can adapt to gradual actual characteristics of the infrastructure.
Required inputs are :
. the navigation map and the GPS: To examine the shape and type of the infrastructure located downstream of the vehicle (turns with their radius of curvature, points of interest like pedestrian crossing, crossroads, etc …)
. the instantaneous vehicle speed
From these two inputs, SafetyNex evaluates, by applying the rules, the adequacy of the driving speed of the vehicle to difficulty and danger of infrastructure.
A sporty driver accelerating hard, braking hard, but passing dangerous places at low speed will be scored with a low risk.
A quiet driver that passes through a stop road sing at 30 km / h without braking will be scored with a high risk.
A brutal braking cannot be considered as « bad driving » if it is necessary to avoid an accident …
We see then, that SafetyNex risk estimation is not correlated with the absolute value of acceleration, but with ACTUAL speed adaptation to difficulty and danger of the infrastructure, in real time.
Additional inputs (optional) are already scheduled, and can afford to modulate the estimated risk to increase acuracy of SafetyNex :
. grip (if one has a sensor to connect to the input provided for the purpose of SafetyNex)
. weather report (if one has the temporal and spatial information)
. atmospheric visibility (if one has adequate measure: example: a camera and the measuring module of atmospheric visibility : VisiNex)
. distance to potential obstacles (if it has an adequate sensor : eg radar, lidar, or camera with RoadNex ObstaNex modules)
. a driver distraction factor (if the driver is observed with a camera and / or if one monitors the activity of mobile phone, etc …)
All these additional inputs are already ready to be used by SafetyNex but of course, they increase the cost of deployment, involving sensors (camera, …) and additional computing power before getting in SafetyNex to process signals and images from the optional sensors.
Using SafetyNex V2.1 with only the required inputs already allows a very high correlation of the estimated risk with the accident. We recommend to implement this version, already infinitely more effective than any other onboard measurements.
The interest of SafetyNex is that the future is already assured: Moore’s Law by rapidly lowering the cost of electronics and embedded computing, SafetyNex is ready to process the additional inputs, when users want to integrate cameras and sensors.
TYPICAL USES OF SafetyNet V2.1
. Insurance Companies:
– Pay how you drive
– Predictive modeling of bonus malus: the same accident under the same conditions does not lead to the same conclusions based on accumulated historical and recording the last seconds risk SafetyNex
– Generation of a dumb risk variable, correlated to the accident, to help actuaries refine pricing (big data)
. Fleet managers
. Automotive equipment suppliers:
– Alarm on risk
– Intelligent Navigation able to advise the driver
. Engineers and researchers from autonomous vehicle:
– Driving Quality Assessment generated by the robot
CONCLUSION
Embedded estimation of road risk of accident is now a problem completely solved by a product available for deployment, SafetyNex.
SafetyNex is deployable at Low cost on:
. mobile phones
. electronic device of a Automotive Tier 1 supplier (without plugging the OBD).
And SafetyNex already planned to integrate (once the cost is acceptable) grip sensors and cameras (for example) to estimate traffic and atmospheric visibility, as well as information such as weather and driver distraction.
All of these are already processed by SafetyNex rules based system, so that the tool can quickly evoluate with each decrease in the cost of sensor elements and cost of computing power needed to compute sensors outputs.
![]()

« when the smartphone becomes a lookout driver »


« Autonomous car is a dream the French Automotive sector »
![]()
NEXYAD was compared to Mobileye and considered as a serious player in the competition.
In french magazine Le Journal de l’Automobile, pp 52-54, 18 Sept 2015
« MobilEye a de la concurrence : longtemps en position monopolistique, la société israélienne a désormais un
concurrent qui s’annonce sérieux dans le domaine des algorithmes de gestion des caméras embarquées, Nexyad.
Rencontre avec les ingénieurs français qui pourraient changer la donne »