– CES 2018 Nexyad Report
– SafetyNex animated video of a use case : The Car Insurer’s Choice
– Nexyad in media
– SafetyNex can bring Artificial Intelligence into Autopilots in respect of ASIL ISO 26262
– Nexyad team wishes you an happy New Year 2018
For the second time, NEXYAD went to CES (2018) in Las Vegas (from 9th to 12th of Jan).
Takeoff at Paris CDG AirportArrival in Las Vegas
Flight to Vegas from Paris is long but it’s worth the trip for a high-tech startup like NEXYAD.
Of course, for NEXYAD, it is the year of deployment in series for our onboard software modules (Connected car/Car telematics, ADAS, Autopilots, Drive and Car sharing), and especially for SafetyNex (estimation of driving risk 20 times per second), and we had organized for a while 6 meetings per day : ADAS and Telematics OEMs that are already currently integrating SafetyNex, and of course new prospects. Very good new contacts too with qualifies prospects from the USA, Japan, Europe.
We also got some interest for RoadNex that integrates a computer vision based free space detection that works perfectly for large round abouts and intersections. We brought a real time RoadNex implementation into an android smartphone (using the smartphone cam and CPU) and we could do some real time demos that show that RoadNex works in a regular smartphone in real time (for those who care of CPU consumption) :
This year we had a barrow on the LeddarTech booth located at Central Plaza, close to Faurecia, Valeo, Google, Visteon, etc … : LeddarTech is member of the MOV’EO Groupement ADAS, and the whole Groupement was part of the « LeddarTech ecosystem » showcase area.
Leddar Ecosystem Pavillon at LVCCGroupement ADAS Desk
We also used some time slots to do our homeworks on Business Intelligence and visited many boothes including competitors of NEXYAD.
From this visits we could extract some heavy trends : of course, CES deals with quite EVERY subject, then we focused on mobility and what is connected to mobility issues.
First, we must notice that 2018 is THE year of Lidar :
Of course, our partner LeddarTech, but also many other solutions from Startups to Major automotive companies :
LeddarTech;
InnovizVelodyne
QuanergyPioneer
Startup II – VIStartup AEye
Toyota
Another heavy trend is smart cities :
Itron (Energy issues) Deloitte (Complete systems and strategy)
LoRa (IOT) Ericsson (Telecom 5G)
Mobility was a big part of Smart Cities and Urban mobility this year in Las Vegas.
Some soft mobility solutions (electric and connected 2-wheels vehicles) :
UjetGenze
And of course, autonomous shuttles were numerous this year :
As you may notice, you can find shuttles from : a pure leader player, an IT major firm, a major car manufacturer, a major operator of urban mobility, and a high-tech startup.
At least, another completely new trend is the autonomous flying vehicles :
Volocopter
* * * * *
SafetyNex animated video of a use case : The Car Insurer’s Choice
SafetyNex by NEXYAD is a Driving Risk Assessment App/API for prevention (accompanied driving, young drivers, individuals, professional drivers, seniors) in every kind of 4 wheels vehicle. SafetyNex is worth for UBI (risk profiles, usage profiles) at the end of every trip; reduction of costs (lower rate of accident and in particular of personal injuries + transformation of some severe personal injuries accidents into material accidents); Detection of behaviour modifications in time and Distraction detection (mobile phone …) : under implementation.
* * * * *
Nexyad in media
Rémi Bastien interview, the new President of competitive cluster Mov’eo and also President of VEDECOM Institute and VP Automotive Prospective of Renault Group.
For English subtitles click the button on the video
Mov’eo is a Mobility and Automotive R&D competitiveness cluster, which since 2006 has been mobilizing its energies at the service of its members to meet the objectives assigned by the State to competitiveness clusters: to foster the development of collaborative projects between members, to contribute to development in the regions of companies, in particular SMES, and to promote innovation in the sector.
Created in february 2014, VEDECOM is a French Institute for Public-Private Partnership Research and Training dedicated to individual, carbon-free and sustainable mobility.
The new MOV’EO President quote NEXYAD SafetyNex at the beginning of its intervention…
* * * * *
SafetyNex can bring Artificial Intelligence into Autopilots in respect of ASIL ISO 26262
Complex Automation MUST be ASIL ISO 26262.
Artificial Intelligence CANNOT BE ASIL ISO 26262 (by definition) and acts only on parameters of Complex Automation doing ++/– – variations, never skipping « reflexes actions » (emergency braking, etc), but allowing anticipation speed adaptation to reduce frequency of emergency situations (and then give more margin to reflexes actions and also improve comfort). Maximum acceptable Driving Risk can be changed depending on driving situation in order to set « aggressivity level» of HAV.
Rémi Bastien interview, the new President of competitive cluster Mov’eo and also President of VEDECOM Institute and VP Automotive Prospective of Renault Group.
For English subtitles click the button on the video
Mov’eo is a Mobility and Automotive R&D competitiveness cluster, which since 2006 has been mobilizing its energies at the service of its members to meet the objectives assigned by the State to competitiveness clusters: to foster the development of collaborative projects between members, to contribute to development in the regions of companies, in particular SMES, and to promote innovation in the sector.
Created in february 2014, VEDECOM is a French Institute for Public-Private Partnership Research and Training dedicated to individual, carbon-free and sustainable mobility.
The new MOV’EO President quote NEXYAD SafetyNex at the beginning of its intervention…
– Come to meet Nexyad at CES 2018 in Las Vegas – January 8-12
– NEXYAD giving the award of the best Insurtech startup «prix coup de cœur des assureurs 2017»,
organized by Cercle LAB (Laboratoire Banque Assurance) at Allianz Tower in Paris La Défense
– Nexyad invited speaker at UNESCO Conference on Artificial Intelligence : use case of autonomous vehicle
– SafetyNex driving risk assessment (20 times per second while driving): anticipation of danger
– INTEMPORA and NEXYAD, members of MOVEO Groupement ADAS interviewed on BFM Business (Major French TV)
– Bitumen Free Space Detection by Nexyad RoadNex module in real time on a Smartphone
– Nexyad on Groupement ADAS booth at Equip’Auto 2017
– Validation of ADAS Nexyad Database with ground reality
– Individual driving risk assessment and car insurance : what applications ? what business models ?
– SafetyNex can bring Artificial Intelligence into Autopilots in respect of ASIL ISO 26262
– Welcome to YOGOKO, new member of “MOV’EO” Groupement ADAS cluster
Come to meet Nexyad at CES 2018 in Las Vegas (Jan 8-12)
Nexyad invite you to visit us at the Leddar Ecosystem Pavillion at East LVCC – Central Plaza (booth CP-23)
If you want to reserve a meeting slot, please contact us at nexyadCES2018@nexyad.net
* * * * *
NEXYAD giving the award of the best Insurtech startup « prix coup de cœur des assureurs 2017», organized by Cercle LAB (Laboratoire Banque Assurance) at Allianz Tower in Paris La Défense
Gerard Yahiaoui at Cercle Lab
Last year Nexyad won the special prize « Coup de Cœur » by french insurers of Cercle Lab with SafetyNex the driving risk assessment App in real time. For this, Gerard Yahiaoui CEO of Nexyad handed the 2017 new prize to the winner KAP-Code represented by Adel Mebarki. Kap-Code is dedicated to improve the care of chronic diseases and the detection of drug safety signals on social networks thruth 3 solutions : helping patients and health advisors with connected objects, Digital Health that allows profesionals to provide care for their patients and harnessing Big Data for science.
Adel Mebarki, head of innovation of Kap-Code
* * * * *
Nexyad invited speaker at UNESCO Conference on Artificial Intelligence : use case of autonomous vehicle
Nexyad CEO Gérard Yahiaoui A.I. expert was invited to speak (invited paper) in a conference in Paris on Artificial Intelligence (JNI/IESF, Under the patronage of UNESCO, 2017 Oc 19). He talked about Artificial Intelligence for Autonomous Vehicle : « Intelligence Artificielle pour le Véhicule Autonome, et exemple de réalisation : SafetyNex ». Very interesting papers during this day showing a broad range of AI applications (automotive, fashion, HR management, Legal, …). More than 400 people in the audience.
Gerard Yahiaoui explaning difference between A.I. and complex automation for autonomous driving
* * * * *
SafetyNex driving risk assessment (20 times per second while driving): anticipation of danger
SafetyNex estimates driving risk 20 times per second, during driving (real time).
On the following figure, you can see risk rising when approaching a stop sign with an inappropriate car speed :
Speed of the car is quite high before the STOP sign and Risk goes to the maximum with a vocal alarm to the driver which have time to slow down or brake to stop.
This estimation is computed INSIDE the local device (inside the car). Current implementation is on smartphones (IOS and Android), then computing of risk is completely done INSIDE the smartphone : that makes SafetyNex compliant with all driver’s privacy regulations and laws in Europe.
INTEMPORA and NEXYAD, members of MOVEO Groupement ADAS on BFM Business (Major French TV)
1st Nov 2017, the Tech & Co tv show on the subject : will self-driving car come sooner than expected ?
Nicolas du Lac & Gerard Yahiaoui
Nicolas du LAC, INTEMPORA, and Gerard YAHIAOUI, NEXYAD, presented their innovations and explained how the MOVEO Groupement ADAS helps to be stronger for their innovative startups.
Nicolas talked about RT-MAPS that is a software tool for R&D, making easy the task of developing applications with multiple sensors (cameras, lidar, radar, …) that of course are not synchronized and that must collaborate through algorithms of sensor fusion in order to get good objects detection and recognition.
Gerard talked about SafetyNex that is an onboard real time module that is the only module in the world that can estimate driving risk 20 times per second. Self-driving car can then know the risk it takes with and it simplifies the development of autopilot (example : « if risk too high then slow down »).
* * * * *
Bitumen Free Space Detection by Nexyad RoadNex on Smartphone
RoadNex detects free space on road with negative detection of obstacles as vehicle on the video below.
* * * * *
Nexyad present with Groupement ADAS at Equip’Auto 2017
Philippe Orvain, CEO of Nomadic Solutions
Nexyad was present with Groupement ADAS at Equip’Auto Congress in Paris. Groupement ADAS is a SME’s cluster : 10 companies with expertise in the field of Advanced Driver Assistance Systems, Connected car and Autonomous vehicle. Philippe Orvain CEO of Nomadic Solutions and competitiveness cluster MOV’EO Vice President has responsed to journalist Laurent Meillaud on Congress TV channel.
Watch Philippe Orvain interview on the congress channel with SafetyNex video demo :
* * * * *
Validation of ADAS Nexyad Database with ground reality
Free space ground reality (for RoadNex) and obstacles ground reality (for ObstaNex)
The NEXYAD company is currently developing the construction of a database for the validation of systems of driver assistance and driving delegation, (ADAS and Autonomous car) using the AGENDA methodology published in the 1990s by Gérard Yahiaoui in the field of machine learning and artificial neural networks applications. Here is an example of ground reality : ground reality is needed in order to automate performance / KPIs measurement when you modify the perception system.(methodology initially intended to handle, among other things, the construction of learning databases and tests for the implementation of neural networks).
This database has two essential characteristics:
1) Real-life situations
Indeed, the AGENDA methodology recommends describing the possible variations of signals and input images as factors of variability and their crosses.
Example, for obstacle detection:
. weather (dry weather, sunny weather, rain, fog) . overall brightness (low, medium, high)
. vehicle speed (low, moderate, high)
. type of road (motorway, road with marking, road without marking, …)
. coating (bitumen 1, bitumen 2, …, pavers)
. day / night (car headlights and infrastructure lighting)
. season (spring, summer, autumn, winter)
. etc.
NEXYAD’s ambition is to propagate its methodological expertise and to enable everyone to evaluate the performance of vision systems for ADAS, be they systems developed by NEXYAD or others.
Individual driving risk assessment and car insurance : what applications ? what business models ?
As many people know now, NEXYAD has been developing the first real time driving risk assessment system called SafetyNex.
SafetyNex is currently available in B2B :
. as a smartphone App (Android and IOS)
. as a real time driving risk assessment API that OEMs and Insurers may integrate into their own smartphone App or into their own telematics or ADAS device (Android, iOS, Linux, Windows).
This real time driving risk assessment module has been validated on 50 million km, and applies proven methods for risk assessment, using, for instance, the Frank E. BIRD « safety triangle » concept, and running in real time a knowledge-based system AI that has been built by NEXYAD since 2001. It took 15 years to extract thousands of road safety knowledge atoms from experts of 19 countries. Some of this knowledge is directly operational, some is deep knowledge on detection theory (a mix of Information Theory and Knowledge on Human Brain abilities). And of course, SafetyNex also applies fundamental knowledge on mechanics (braking abilities, …) including complex issues such as grip for example.
Complex Automation MUST be ASIL ISO 26262.
Artificial Intelligence CANNOT BE ASIL ISO 26262 (by definition) and acts only on parameters of Complex Automation doing ++/– – variations, never skipping « reflexes actions » (emergency braking, etc), but allowing anticipation speed adaptation to reduce frequency of emergency situations (and then give more margin to reflexes actions and also improve comfort). Maximum acceptable Driving Risk can be changed depending on driving situation in order to set « aggressivity level» of HAV.
* * * * *
Welcome to YOGOKO, new member of « MOV’EO » Groupement ADAS cluster
In november, cluster Groupement ADAS, from Mobility and Automotive R&D competitiveness national cluster Mov’eo, welcomed YOGOKO as new member. It makes eleven players like a football team, and we hope to score goals in the Automotive market competition.
YoGoKo is a startup company founded in 2014 by employees from three research institutes : Mines ParisTech, Telecom Bretagne and Inria. YoGoKo makes use of software developed in teams specialized in Internet technologies (RSM at Telecom Bretagne) and robotics (CAOR at Mines ParisTech and RITS at Inria). These research teams have been working together since 2006 on innovative communication solutions applied to Intelligent Transportation Systems. They contributed to several collaborative R&D projects related to ITS (CVIS, ITSSv6, GeoNet, DriveC2X, SCORE@F, …).
In 2012, these laboratories engaged together into the development of a common demonstration platform which comprises connected vehicles (fleet of conventional vehicles from Mines ParisTech and fleet of autonomous vehicles from Inria), roadside equipments and cloud-based services.
YoGoKo demonstration platform was finally revealed on Feb. 11 th 2014 during the Mobilité 2.0 event organized by the French Ministry of Transport. This successful demonstation and the extremely warmfull feedack gained at this occasion triggered the launch of YoGoKo as a company.
Nexyad was present with Groupement ADAS at Equip’Auto Congress in Paris. Groupement ADAS is a SME’s cluster : 10 companies with expertise in the field of Advanced Driver Assistance Systems, Connected car and Autonomous vehicle. Philippe Orvain CEO of Nomadic Solutions and competitiveness cluster MOV’EO Vice President has responsed to journalist Laurent Meillaud on Congress TV channel.
Watch Philippe Orvain interview on the congress channel with SafetyNex video demo :
– Road accident and driving risk are two different notions
– Nexyad at AutoSens Brussels 2017
– Enova Symposium Paris 2017
– Connected & Self-driving Car Meetup #9
– Academic chair at MOV’EO with INSA Rouen
– Sensor fusion and data fusion with SafetyNex
– SafetyNex : Understanding the Concept of Risk
– NEXYAD : the story
– Navigation Based ADAS : use SafetyNex to build ACC and anticipation (predictive) brake systems
Road accident and driving risk are two different notions
A lot of professionals that must cope with road safety observe accident through statistics : it seems to be normal to think that safety is low where there are a lot of accidents and that safety is high where there are few accidents.
This reality tends to make people confuse the two notions : risk and accident.
And since you stay at the statistic level, then it works : if 99% of people that played russian roulette more than 50 times have died (accident), then you can say that russian roulette is risky (risk).
Insurance companies, fleet managers, have taken into account those statistics, in order to estimate their future costs, and compute their pricing.
But now, digital connected devices are available at the very individual and local level : telematics (professional devices installed into cars), smartphones, connected car, can estimate the driving behaviour in real time and they know exactly where you drive.
Then, what this new technology brings to risk assessment ? and can you still apply at the individual level the ideas that was set at a population (statistics) level ?
That question was studied in 1969 by an American University Professor that was also a researcher for the company « Insurance of North America », Frank E. BIRD, and a key notion was then used : the « incident » or « near miss accident » or « quasi accident ». It was shown that the risk you take does not lead to accident but to « quasi-accident ». Indeed, even in very risky situations, accident can be avoided most of the time at the very last second ! Frank E. BIRD worked on what was called « The Triangle of Risk » or « Safety Triangle »
Sometimes, you do not have luck … and then you have an accident instead of having a quasi-accident.
Example of Statitical Relationship in Risk Assessment : from Behaviour to Fatalities
Then accident is the confluence of « risk you take » and « bad luck ». It is interesting to notice that, if you do not study the individual and local (in space and time) level, so if you consider a large population of drivers during a long duration, then « bad luck » automatically disappears… and so risk can be measured by observation of accident. But at the individual and local levels, risk cannot be measure by observing accident.
It is interesting to read about Safety Triangle and then have a clear idea of links between RISK, ACCIDENT, SEVERE PERSONAL INJURIES.
In road Safety concerns, researchers and experts have been working during 50 years on this concept of quasi-accident and they accumulated data and knowledge about this key notion. Let us resume the russian roulette comparison : pulling the trigger is the quasi-accident … and sometimes you die (accident). But even before playing such a « game » you KNOW that it is risky.
The knowledge of risk is represented by a collection of cause-effect relationships.
There is a knowledge-based artificial intelligence system that gathered the knowledge from road safety experts and researchers (that work mainly on road infrastructure) and that is now available in order to assess driving risk in real time : SafetyNex developed by the company NEXYAD. SafetyNex is the « thermometer » of driving risk and it alerts the driver BEFORE the dangerous situation, letting time to slow down and then potentially to avoid accident, to reduce severity (less personal severe injuries), …
Obviously, markets are :
. car insurance (prevention, severity, UBI)
. fleet management (prevention, reduction of costs, fit in regulations and laws)
But even the automotive can take benefit of suche a real time driving risk assessment module :
. intelligent navigation with risk vocal alerts
. automatic triggering of braking for ADAS (if risk too high then slow down)
. driverless cars : giving to the artificial intelligence that drives the car the perception of the risk it takes…
SafetyNex opens the door to a new generation of onboard applications for every field of automotive sector that is concerned with risk and safety. Read more
* * * * *
Nexyad at AutoSens Brussels 2017
AutoSens took place at the AutoWorld Museum in Brussels September 19-21.
To answer the issues of Connected Cars and Autonomous Cars, engineers need first to give eyes, ears and A.I. to future vehicles. Sensors will play this crucial and difficult role of replacing the human senses.
Engineers and sensors providers met for three days of conferences and workshops.
Groupement ADAS was present with Leddartech the lidars canadian company that rose 100 M$ funding, New Imaging Technologies with their unique high dynamic range camera sensors, Intempora that provide famous RT-Maps, and of course Nexyad presented his three camera-based software modules for Road Detection – RoadNex, for Obstacles Detection – ObstaNex, for Visibility Measurement – VisiNex and SafetyNex – the Road Safety system with sensors fusion and data fusion (digital map, accelerometers, GPS, cameras, lidars, radars, ultrasounds, weather data, traffic data, etc.).
New players appeared as Crowdflower or Mighty Ai, they are plateforms that help you process your data or images very quickly by dividing the workload with very many people registered online.
* * * * *
Enova Symposium Paris 2017
Round Table at ENOVA symposium in Paris, on the subject of self-driving car
(see from left to right)
. Vincent ABADIE, Vice-President Expert Leader Autonomous Vehicle and ADAS, PSA Group
. Jochen LANGHEIM, Vice-President advanced systems R&D programs, ST MICROELECTRONICS
. Jean-François SENCERIN, Autonomous Driving NFI/PFA Program Director
. Gérard YAHIAOUI CEO, NEXYAD
. Guillaume DEVAUCHELLE, Vice-President Innovation, VALEO
. Alain PIPERNO, Expert Safety & Autonomous Vehicle, UTAC
The audience could listen to this experts panel and ask questions about connected and driverless cars.
Journalist : Laurent MEILLAUD
ENOVA, Paris, Porte de Versailles
3 days of exchanges and conviviality at the service of Innovation + Business Meetings driven by THE NEW NEEDS OF CONNECTIVITY. Read more about the Event
* * * * *
Connected & Self-driving Car Meetup #9
Nexyad was invited to the Connected & Self-driving Car Meetup #9 at Le Square (Renault’s innovation lab in Paris), on september 13.
Thanks to the perfect organisation of Laurent Dunys and Bruno Moncorge.
A large audience listened presentation about vehicles and data security with Nabil Bouzerna of IRT SystemX. Finally, Jean-François Menier, lawyer at Elyos Avocats gave a very interesting wrap-up about the potential responsibility of a driver in the case of a connected / self-driving car accident and of course about driver and passengers safety with SafetyNex App : real time driving risk assessment.
* * * * *
Academic chair : effective collaboration between MOV’EO groupement ADAS and INSA Rouen
MOV’EO Groupement ADAS built an academic chair with INSA ROUEN (option Intelligent Transportation) on ADAS and driverless cars.
The first course was given by Gérard YAHIAOUI, CEO of NEXYAD, the 13th of September 2017 in Rouen : presentation of key notions (near missed accident, driving risk), and presentation of SafetyNex (real time driving risk assessment) and applications to car insurance, fleet management, ADAS, and driverless cars.
* * * * *
Sensor fusion and data fusion with SafetyNex
SafetyNex is a real time driving risk assessment system. Of course, Driving Risk makes everyone think of car insurance and fleet management. And it is a natural application (deployment has already started). But it is important to note that Driving Risk is also a key notion for ADAS and Driverless car.
Indeed, Driving Risk happens when there is no adequation between Driving Behaviour and Driving Context. ADAS and Driverless act on Driving Behaviour :
. ADAS modifies Driving Behaviour : braking when the human driver did not, etc …
. Driverless car creates Driving Behaviour : there is still a driver called « artificial intelligence ».
Driving context is measured :
. Map Electronic Horizon
. GPS
. Accelerometers
. Times to collision (front and rear)
. Number of vulnerables around (even on sidewalks)
. Atmospheric visibility / weather condition (fog, pouring rain, etc.)
. X2Car Data Streams (accident, weather alert, construction area, etc.
So you can now imagine that if you have the opportunity to ESTIMATE adequation between Driving Behaviour and Driving Context, then you can build much more relevant ADAS and Driverless Artificial Intelligence (adequation or inadequation).
You may notice that Driving Context is measured through heterogenous sensors and data streams. It brings no difficulty to SafetyNex that uses Fuzzy Sets and Possibility Theory to estimate adequation, givin a Driving output called Driving Risk (that you should want to minimize under constraints of mobility efficiency).
Then SafetyNex is actually a sensor and data fusion system (high level fusion), much more efficient than every fusion systems that you ever developed, because it generates a variable (Driving Risk) that is a KEY NOTION for driving and is EASY TO UNDERSTAND AND USE.
NEXYAD implemented a low cost version with only the first 3 inputs (more than 5,000 road safety rules to cope with the infrastructure dangers …) and is now implementing simple rules to take into account mobile context. Example: « the shorter the time to collision, the higher the risk ». And that’s it ! The knowledge based artificial intelligence of SafetyNex automatically does the fusion with the 5,000 rules. There is no need to « weight » the rules, as possibility theroy allows a fusion with every rule competing with the others … Elegant applied maths to a problem that most engineers describe in a so complicated way that it becomes impossible to solve.
We really encourage ADAS and Driverless engineers to come to us and simply integrates SafetyNex (low CPU consumption, easy real time, etc.) and then get NOW a proven sensor fusion and data fusion system that works. This gives ONE dimension of Driving Systemic Analysis items: Driving Risk, in real time.
Of course, if you do the systemic analysis you will find other dimensions of interest (we let you do that, we’ve done it for ourselves, trace of the military research past of NEXYAD founders).
SafetyNex is now under implementation by big ADAS OEM companies. Series deployment will start in 2018. We will be glad to help you being a part of it.
* * * * *
SafetyNex : Understanding the Concept of Risk
SafetyNex App is a real time driving risk assessment. We present below 3 videos to explain as simply as possible the concept of driving risk.
Luck doesn’t change the risk that the driver takes. It means that risk taken by the « lucky risky driver » is exactly the same than risk taken by the « unlucky risky driver ». It is possible then to detect risky drivers before they have accident (anticipation of costs). Once detected, it is possible to train them (prevention program).
Because SafetyNex driving risk assessment is done in real time, it is possible to alert the driver (when risk is higher than an acceptable value), and if driver slows down, then risk never rises at the red level. It is an onboard prevention system (ADAS).
Observation of accidents on a short period of time (3 months for instance) may not show any difference between « cautious driver » and « lucky risky driver » (both of them may not have accident). It is a big problem for UBI, and SafetyNex brings the solution as it anticipates accident (sooner or later the « lucky risky driver » will have a severe accident).
All you have to know about the french High Tech company.
NEXYAD is a « fake startup » (much older than it seems ^^) set up in 1995 by maths research engineers (Pierre DA SILVA DIAS & Gérard YAHIAOUI + other shareholder : researchers, finance executives, engineers). Founders came from military research (anti-tank missiles), with a strong culture of computer vision, machine Learning, artificial intelligence, signal theoy and processing, stats and data analysis.
During years we were the extended maths team of famous big firms in many fields : defence, automotive, banking, insurance, energy, cosmetics, agri-food, glass, railways, … Customers were research departments first, and then product and marketing departments, sales departments, industrial labs, manufactures, actuaries, etc.
In the automotive sector, we’ve been involved in a lot of different high level maths works such as :
. production/manufacture (work for PSA Group, Charleville),
. industrial Lab (work for PSA Group – Belchamp,TOYOTA Europe – Brussels, Robert BOSCH GmbH, Bühlertal, VALEO, La verrière – SAINT GOBAIN, … etc.)
. research & development for PSA Group, RENAULT, NISSAN, IEE, DAIMLER, FAURECIA, LE LAB (PSA RENAULT), on perception by camera, radar, capacitive sensors, ultrasound, infrared, etc … , vehicle dynamics (active control), sensorial analysis (touch smell perception of texture by vision), human factor analysis, detection of passengers on seats, odor gas sensors, artificial intelligence, epidemiologic analysis (pollution, particles, …), etc.
Navigation Based ADAS : use SafetyNex to build ACC and anticipation (predictive) brake systems
Imagine a robotized car that would slow down automatically when approaching a tiny curve, or an intersection or a priority, of a stop sign, etc … if needed (i.e. if and only if the current speed and acceleration of the car is not appropriate to the driving context). Sounds interesting ?
It would be then « smooth anticipation braking » (from 0.1 to 0.3 g) instead of « emergency braking » (so easier to do and not that disturbing for driver and passengers comfort in the car). Doing this, the car dramatically decreases the probability to be kept in a dangerous situation and it let much more margin to emergency brake if still needed.
Finally, it would mean that the car follows road traffic code plus safety rules (anticipation).
This is easy to achieve using NEXYAD real time driving risk assessment module SafetyNex : SafetyNex reads « Electronic Horizon » (reading POIs and decoding shape and dimensions of the infrastructure ahead), « GPS« , « accelerometers« , and can accept additional inputs such as « time to collision« , « size of free space« , « position in the lane« , « atmospheric visibility« , alert data streams (weather, accident, traffic, …). All those heterogenous data are used (data fusion) to estimate driving risk in real time : Driving Risk (t)
Then everytime that Driving Risk(t) comes higher than an acceptable threshold value, the robotized car slightly slows down … and that’s it ! SafetyNex is the result of 15 years of collaborative research and it works.
Markets : Car insurance and fleet managers (for real time alert and risk profiles recording), ADAS (for automatic predictive/anticipation brake), and Driverless car (Automated car that follows Road Traffic Code).
SafetyNex is Under deployment, please feel free to try it and put it into your own products (available as an API).
Keywords : Adaptive Cruise Control, ACC, Intelligent ACC, Intelligent Cruise Control, navigation-based, navigation-based ADAS, NB ADAS, ADAS, Advances Driver Assistance Systems, Anticipation brake, Predictive Brake, SafetyNex, Risk, Driving Risk, Real time driving risk assessment, road traffic code, SafetyNex, electronic horizon, GPS, accelerometers, time to collision, free space, size of free space, position in the lane, lane departure, visibility, atmospheric visibility, data stream, weather, accident, traffic, data fusion,…
SafetyNex is a real time driving risk assessment system. Of course, Driving Risk makes everyone think of car insurance and fleet management. And it is a natural application (deployment has already started). But it is important to note that Driving Risk is also a key notion for ADAS and Driverless car.
Indeed, Driving Risk happens when there is no adequation between Driving Behaviour and Driving Context. ADAS and Driverless act on Driving Behaviour :
. ADAS modifies Driving Behaviour : braking when the human driver did not, etc …
. Driverless car creates Driving Behaviour : there is still a driver called « artificial intelligence ».
Driving context is measured :
. Map Electronic Horizon
. GPS
. Accelerometers
. Times to collision (front and rear)
. Number of vulnerables around (even on sidewalks)
. Atmospheric visibility / weather condition (fog, pouring rain, etc.)
. X2Car Data Streams (accident, weather alert, construction area, etc.
So you can now imagine that if you have the opportunity to ESTIMATE adequation between Driving Behaviour and Driving Context, then you can build much more relevant ADAS and Driverless Artificial Intelligence (adequation or inadequation).
You may notice that Driving Context is measured through heterogenous sensors and data streams. It brings no difficulty to SafetyNex that uses Fuzzy Sets and Possibility Theory to estimate adequation, givin a Driving output called Driving Risk (that you should want to minimize under constraints of mobility efficiency).
Then SafetyNex is actually a sensor and data fusion system (high level fusion), much more efficient than every fusion systems that you ever developed, because it generates a variable (Driving Risk) that is a KEY NOTION for driving and is EASY TO UNDERSTAND AND USE.
NEXYAD implemented a low cost version with only the first 3 inputs (more than 5,000 road safety rules to cope with the infrastructure dangers …) and is now implementing simple rules to take into account mobile context. Example: « the shorter the time to collision, the higher the risk ». And that’s it ! The knowledge based artificial intelligence of SafetyNex automatically does the fusion with the 5,000 rules. There is no need to « weight » the rules, as possibility theroy allows a fusion with every rule competing with the others … Elegant applied maths to a problem that most engineers describe in a so complicated way that it becomes impossible to solve.
We really encourage ADAS and Driverless engineers to come to us and simply integrates SafetyNex (low CPU consumption, easy real time, etc.) and then get NOW a proven sensor fusion and data fusion system that works. This gives ONE dimension of Driving Systemic Analysis items: Driving Risk, in real time.
Of course, if you do the systemic analysis you will find other dimensions of interest (we let you do that, we’ve done it for ourselves, trace of the military research past of NEXYAD founders).
SafetyNex is now under implementation by big ADAS OEM companies. Series deployment will start in 2018. We will be glad to help you being a part of it.
Blog ADAS provides quantity of information about Advanced Driver Assistance Systems or ADAS, Connected Car, Driverless Technologies, Trends, News, Market Analysis, Business Intelligence, …
More than 1000 daily readers and almost 4000 those last two months.
SafetyNex App is a real time driving risk assessment. We present below 3 videos to explain as simply as possible the concept of driving risk.
Luck doesn’t change the risk that the driver takes. It means that risk taken by the « lucky risky driver » is exactly the same than risk taken by the « unlucky risky driver ». It is possible then to detect risky drivers before they have accident (anticipation of costs). Once detected, it is possible to train them (prevention program).
Because SafetyNex driving risk assessment is done in real time, it is possible to alert the driver (when risk is higher than an acceptable value), and if driver slows down, then risk never rises at the red level. It is an onboard prevention system (ADAS).
Observation of accidents on a short period of time (3 months for instance) may not show any difference between « cautious driver » and « lucky risky driver » (both of them may not have accident). It is a big problem for UBI, and SafetyNex brings the solution as it anticipates accident (sooner or later the « lucky risky driver » will have a severe accident).
Imagine a robotized car that would slow down automatically when approaching a tiny curve, or an intersection or a priority, of a stop sign, etc … if needed (i.e. if and only if the current speed and acceleration of the car is not appropriate to the driving context). Sounds interesting ?
It would be then « smooth anticipation braking » (from 0.1 to 0.3 g) instead of « emergency braking » (so easier to do and not that disturbing for driver and passengers comfort in the car). Doing this, the car dramatically decreases the probability to be kept in a dangerous situation and it let much more margin to emergency brake if still needed.
Finally, it would mean that the car follows road traffic code plus safety rules (anticipation).
This is easy to achieve using NEXYAD real time driving risk assessment module SafetyNex : SafetyNex reads « Electronic Horizon » (reading POIs and decoding shape and dimensions of the infrastructure ahead), « GPS« , « accelerometers« , and can accept additional inputs such as « time to collision« , « size of free space« , « position in the lane« , « atmospheric visibility« , alert data streams (weather, accident, traffic, …). All those heterogenous data are used (data fusion) to estimate driving risk in real time : Driving Risk (t)
Then everytime that Driving Risk(t) comes higher than an acceptable threshold value, the robotized car slightly slows down … and that’s it ! SafetyNex is the result of 15 years of collaborative research and it works.
Markets : Car insurance and fleet managers (for real time alert and risk profiles recording), ADAS (for automatic predictive/anticipation brake), and Driverless car (Automated car that follows Road Traffic Code).
SafetyNex is Under deployment, please feel free to try it and put it into your own products (available as an API).
Keywords : Adaptive Cruise Control, ACC, Intelligent ACC, Intelligent Cruise Control, navigation-based, navigation-based ADAS, NB ADAS, ADAS, Advances Driver Assistance Systems, Anticipation brake, Predictive Brake, SafetyNex, Risk, Driving Risk, Real time driving risk assessment, road traffic code, SafetyNex, electronic horizon, GPS, accelerometers, time to collision, free space, size of free space, position in the lane, lane departure, visibility, atmospheric visibility, data stream, weather, accident, traffic, data fusion,…
I – INTRODUCTION
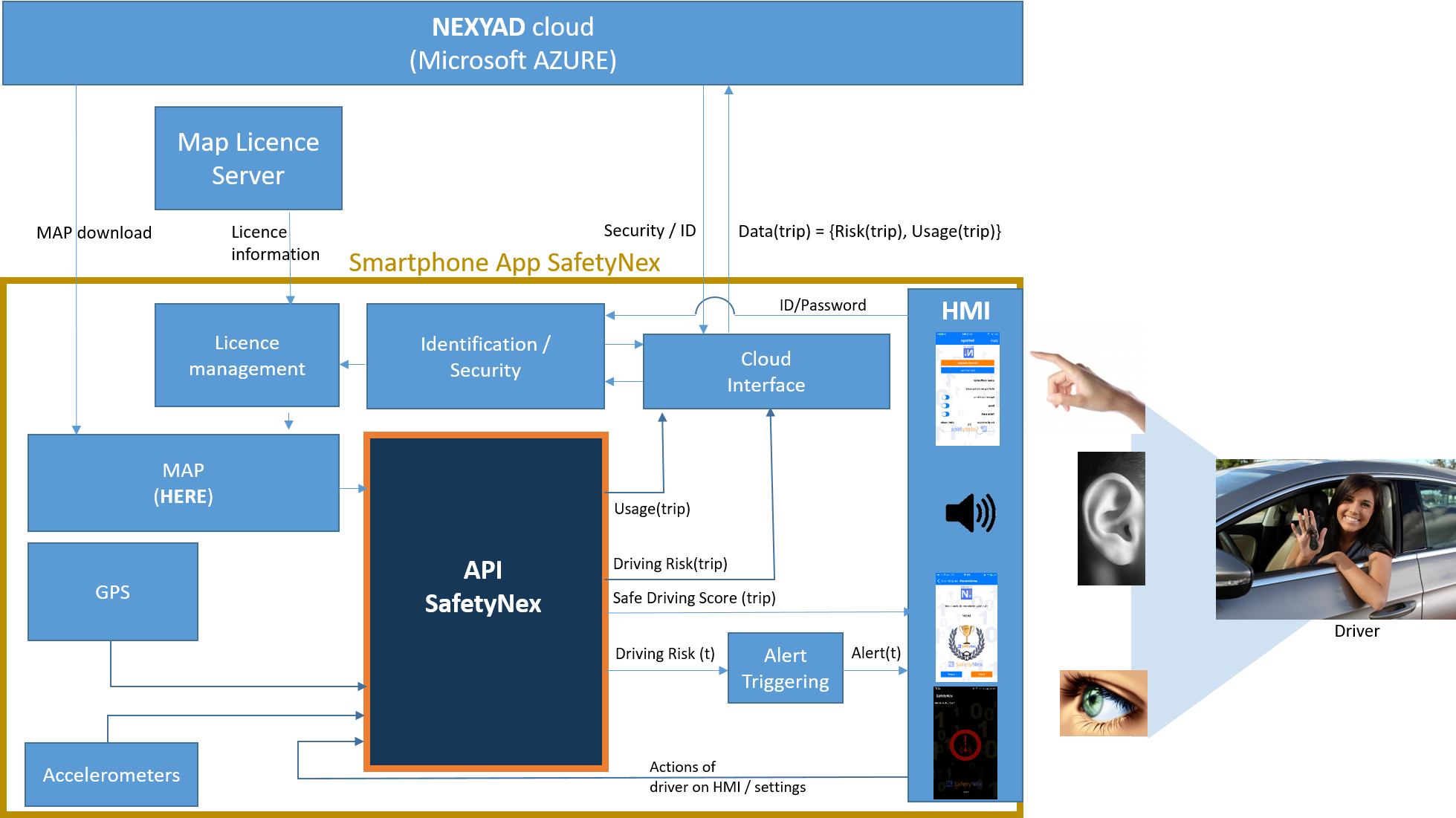
NEXYAD has been developing the smartphonte application SafetyNex which estimates the risk of driving in real time [1]. SafetyNex is both a driver assistance system (ADAS), which alerts the driver (vocal alert) before danger (When the risk increases too much), and a telematics system that records risk profiles and usage profiles.
Warning before the danger gives the driver time to slow down and avoid the accident. Road Safety studies show that SafetyNex can reduce the number of accidents by 20% [2]. This simple functionality is of interest of car insurers, fleet managers, and to car manufacturers.
SafetyNex also rewards the driver with cups (gold, silver, bronze) that can be transformed into money incentive (vouchers, etc.) so that the safe drivers stil have a daily interest to go on using SafetyNex. Indeed, tools that are not used over a period of time rarely have a real effect on the accidentology. SafetyNex is therefore distinguished from other products, on the one hand by its real time and driving assistance, but also for its « reward » side. SafetyNex informs the driver In real time when the risk exceeds a threshold of danger, than one can say that SafetyNex gives the risk in the hands of the driver first. The driver is in control of his/her risk.
Then SafetyNex distinguishes from all telematics products that ultimately provide information to the insurer or fleet manager, but not to the driver who feels rightly spied on.
Risk and usage profiles [3] are forwarded to managers who have an interest in minimizing risk and the number of accidents. This paper presents a simple way to interpret the risk profiles constructed by SafetyNex.
II – SafetyNex RISK PROFILES
SafetyNex estimates risk of driving at every instant.
Since SafetyNex also measures usages, it measures among other things the durations and the number of traveled kilometers.
One can then construct the curve Risk (t) which is the risk at each moment, and also the curve Risk (km) which is the risk at each point of the route.
Let’s consider one or the other of those curves, it is easy then to cut the risk into slots:
It is therefore possible to calculate the total duration spent [resp the total number of km carried out] with a risk
between 10% and 20%, for example (or between 50% and 60%). The graph of these durations [resp number of km] for each range of risk (0% -10%, 10% -20%, etc.), looks like :
It can be seen that this graph can be seperated into three parts:
. A very high bar of near zero risk
. A shape of « bell curve » comparable to a gaussian
. Rising at the very end towards high risks
NEXYAD has run over 3,500 testers since June 2016, and has been able to interpret the shapes of these curves.
III – INTERPRETATION OF SafetyNex RISK PROFILES : CONSENTED RISK, EXPERTISE OF DRIVING, LACK OF ANTICIPATION OF DRIVER
The large quasi-zero risk bar simply expresses the fact that overall the car is a safe mode of transportation.
The part that draws a bell curve has a more or less strong spread : we have noticed that experienced drivers have a narrow curve (repeatability of their driving style is high) while beginners have a huge spread (they can’t drive always the same way).
The centering of the bell curve (maximum likelihood) corresponds to the way in which the driver takes a controlled Risk : cautious beginners have a low maximum likelihood (they try to take as less risk as they can) while experienced drivers have a higher maximum likelihood : they know what risk level thay can cope with.
Finally, the values that go up to the right (tail of distribution of the curve in bell) correspond to the vocal alerts, that is to saycases where the driver has not fully understood that the risk is high. In other words, it is the lack of anticipation and misunderstanding of road.
IV – CONCLUSION
SafetyNex’s risk profiles make it possible to understand the kind of driver you have :
. Cautious / not cautious (maximum likelihood of the bell curve position)
. Experienced / beginner (spreading of the bell curve)
. Lack of anticipation / very good anticipation (queues of distribution of the curve in bell)
Fleet insurers and managers therefore have all the information that they need to help the driver.
For example, within the framework of prevention plans, offering training adapted to each type of risky driving.
We validated this information by driving 3,500 testers, including beginners, experienced drivers, and also pilots (who in take risks appearance, but in reality have a very safe driving). This allowed us to give these interpretations of SafetyNex’s risk profiles.
With the deployment of SafetyNex to reduce the number of accidents, professionals structurally gain margin, and can use this margin to analyze profiles, segment them, and find the segments where it may be interesting to develop UBI (Usage Based Insurance) and real time pricing fleet.
This multi-functionality of SafetyNex makes it a unique and effective tool for managing driving risks.
NEXYAD Automotive & Transportation Newsletter #16, April 11th, 2017
Achieving of real time risk assessment in car telematics with Safetynex
Headlines :
– New Rating of Nexyad by Early Metrics
– BIKER ANGEL Project selected for Government funding (FUI23)
– Conference on Machine Learning organized by SNCF
– Nexyad Paper at 1er European Conference on Connected and Automated Driving
– Meeting Mov’eo, Systematic and Cap Digital
– Nexyad has visited 6th « les Rencontres Flotauto »
– Nexyad in Media
– SafetyNex available on stores for testers (Apple and Google)
– Groupement ADAS welcomed New Member NIT New Imaging Technologies
– Articifial Vision Products of Nexyad
NEXYAD has just been rated again by the rating agency Early Metrics and got the score of 81/100 which puts us in the top 2% of companies rated by Early Metrics. This rating is primarily for investors.
Early Metrics is an European rating agency of startups and SMEs.
* * * * *
BIKER ANGEL Project selected for Government funding (FUI23)
The FUI23 French collaborative research program published the list of projects that are approved : The project BIKER ANGEL (adaptation of the real time driving risk assessment module SafetyNex to motorbikes) is selected !
Biker Angel Project led by NEXYAD was already labelised by Competitiviness Cluster FINANCE INNOVATION.
Le programme de recherche collaborative FUI23 (Fond Unifié Interministérielle) a publié la liste des projets approuvés : BIKER ANGEL est sélectionné (adaptation du logiciel de mesure du risque en conduite temps réel SafetyNex pour la moto).
Le projet BIKER ANGEL porté par NEXYAD avait déjà été labelisé par le Pôle de Compétitivité FINANCE INNOVATION.
Very interesting conference on Machine Learning and Deep Learning. SNCF RESEAUX welcomed a large audience last tuesday 28th march in Saint Denis.
French experts of A.I. field were introduced by Claude Solard SNCF réseau Chief Operating Officer and Jean-Jacques Thomas Director of Innovation.
Christophe Garcia, Full professor at INSA Lyon, deputy director of the LIRIS laboratory, gave an introduction to Neural Networks and Artificial Intelligence and answered to the audience’s questions.
Then, Gérard Yahiaoui, CEO of Nexyad, Vice President of the MOV’EO Cluster, explained the Criteria for use and Methodology for implementation: the methodology AGENDA.
Gérard Yahiaoui CEO of Nexyad
From CEA List, Jean-Marc Philippe presented « from the Neural Network Tools to the Optimized System ». The conference continued with a roundtable about the SNCF Cafeine Project or how to go from the industrial need to the applied solutions in SNCF Réseau; animated by Alain Rivero, SNCF Réseau Director of Cafeine Project; Xavier Roy, Head of Innovation of ITNovem; Michel Paindavoine, co-founder of Global Sensing Technologies and professor at University of Bourgogne; and Jean-Jacques Thomas Director of innovation of SNCF Réseau.
The CAFEINE Project proposes to use the Artificial Neural Networks to detect the defects of pantographs on moving trains, and also to read the number of each wagons, oars and containers.
Another roundtable was organized about Startups and A.I. with Kunthirvy Collin-Dy, Head of relationships with Startups of SNCF Réseau Robot Lab; and Yannick Gérard, Head of Project of DAVI.
Patrick Bastard, Director of Driving Assistance Systems engineering of Renault, ended the conference with a presentation on an opening to other fields of application : vehicles electrification, ADAS and autonomous driving.
From the left : Jean-Marc Philippe, Patrick Bastard et Christophe Garcia
* * * * *
Nexyad Paper at 1er European Conference on Connected and Automated Driving
Machine Learning and Artificial Intelligence for Intelligent Connected Car : The Validation Issue.
A paper by Brahim Yahiaoui, Pierre Da Silva Dias and Gérard Yahiaoui
First European Conference on Connected and Automated Driving
3-4 april 2017 – European Commission, Charlemagne Building, Brussels
– How to concile high complexity of A.I. with ASIL standard that needs a system to be fully predictable ?
– How to make sure that machine learning based behaviour will be adapted to new cases ?
– A Conception AND Validation methodology : « AGENDA »
* * * * *
Meeting Mov’eo, Systematic and Cap Digital
A networking event took place at Cap Digital in Paris, the 16th of march. In the presence of Christophe SIRUGUE, Secretary of State for the Digital and Innovation Industry, the goal of this meeting was to bring together SMEs or startups offering innovative technologies or services for the connected vehicle.
Jean-Luc Moullet, Director of the competitiveness program, industrial and transport , Investment advisory services for the government, introduced the support mechanisms available under the Investments Program of the Future. Jean-Luc BROSSARD, R&D Director of PFA spoke about the Dynamics of innovation and needs of the automotive sector and mobilities. Anne Laliron, Director of Business Lab for PSA, gave a car manufacturer vision for the future. Gérard Yahiaoui, CEO of Nexyad and vice-president of Mov’eo, Michaël Fernandez, CEO of Drust, and Thierry Ernst, CEO of YoGoKo, advocated view for SME’s and Startups. Then Marc Charlet, Managing Director of MOV’EO, Patrick Cocquet, General Delegate of Cap Digital Hub, and François Cuny, General Delegate of Systematic Hub, discussed about Hub contributions. Christophe Sigure concluded this information-sharing.
Thierry Ernst on the left with the mic, Michaël Fernandez and Gérard Yahiaoui on the right
* * * * *
Nexyad has visited 6th « les Rencontres Flotauto »
On Thursday, March 9, the « Rencontres Flotauto » or Professional fleet meeting were held in Paris.
This important event brings together all players of the fleet sector.
Suppliers of telematic equipment such as Nomadic Solutions, a French eco-driving specialist. Pure fleet management as Fleetmatics a French SME recently acquired by the American giant Verizon . New mobility startups such as OpenFleet which offers car sharing solutions for professionals. Almost all the European and Japonese car manufacturers were also represented by their Fleet subsidiary such as Volkswagen Group Fleet Solution.
Fleetmatics booth
Nomadic Solutions on the right and Carte Carburant Leclerc on the left
* * * * *
Nexyad in Media
Saint Germain en Laye : This App promises to Secure your Driving, by Jeremy Denoyer.
« C’est une application dont certains conducteurs ne pourraient plus se passer. SafetyNex, actuellement en phase de test auprès de 3500 utilisateurs, permet de déclencher des alertes en fonction de la dangerosité des aménagements fixes (croisements, ronds-points, virages) et des excès de vitesse. Développée par la société Nexyad, basée à St Germain en Laye, cette application devrait être disponible sur les plates-formes de téléchargement mobile d’ici deux mois. »
SafetyNex available on Stores for Testers (Apple and Google)
To test SafetyNex in your car, send your iTunes email if you use iOS smartphone or your Google account email if your smartphone is an Android one, to this adress obenel@nexyad.net
Today SafetyNex works on four continents :
– Europe : Austria, Belgium, France, Germany, Ireland, Italy, Nederland, Spain, Switzerland, United Kingdom
– North America : Mexico, United States
– South America : Chile
– South Asia : India, Singapore
We’ll integer new countries as soon as possible and on demand.
NOTICE : SafetyNex is now also available for integration in any Smartphone App and Electronic Devices through an API.
Groupement ADAS welcomed New Member NIT New Imaging Technologies
Groupement ADAS is a Team of innovative companies (cluster) with over 20 years experience in the field of technologies used in assistance driver systems (design, implementation and integration of ADAS in vehicles for safety features, driver assistance, partial delegation to the autonomous vehicle).
Last month, a new member joined the cluster to make ten companies !
New Imaging technologies (NIT) offers CMOS and InGaAs imaging sensors and cameras operating over an extraordinary dynamic range of more than 140dB. Our sensors are particularly useful for machine vision, automobile and autonomous driving, biometrics, security and surveillance. NIT delivers from large volume production down to small numbers and custom products. Our facility is fully ISO9001 accredited.
– RoadNex is a functional bloc (software) for ADAS (Advanced Driver Assistance Systems) : detection of the road shape/contours and lane in front of the vehicle.
– ObstaNex is a functional bloc (software) for ADAS (Advanced Driver Assistance Systems).
ObstaNex detects obstacles (a car, a pedestrian). Definition of an obstacle: object that is not plane (or that is « enough » vertical), and/or that has a movement that is not due to the movement of the camera.
– Visinex Onboard is a functional bloc (software) for ADAS (Advanced Driver Assistance Systems).
VisiNex Onboard measures the visibility on a region of interest (visual quality score and distance of detection).
Depuis 10 ans déjà, Mov’eo facilite les innovations en matière de transport intelligent et de mobilité entre les initiatives entrepreneuriales et les grand groupes automobiles. Fort de cette expérience, le pôle de compétitivité lance « PME championne », un nouveau programme d’excellence pour permettre aux PME et aux start-up innovantes de passer la vitesse supérieure. Objectif pour Mov’eo : identifier et accélérer 3 pépites disruptives dans l’écosystème français par an. NEXYAD et ADACCESS sont les deux premières à intégrer ce programme d’exception.
Un programme pour booster les PME et les start-up au plus fort potentiel sur le marché .
Aujourd’hui le JDN ou Journal Du Net publie l’information que nous vous proposions il y a quelques jours en avant première : Mov’eo consacre Nexyad PME Championne.
Le pôle de compétitivité dédié à l’automobile lance le programme « PME championne » pour accompagner la croissance des entreprises les plus prometteuses du secteur.
Adaccess et Nexyad sont les deux premières PME à avoir été choisies. La première, créée en 2013, a séduit Mov’eo avec eVa, une plateforme de mutualisation des données anonymisées générées par les véhicules connectés à destination de l’industrie automobile. « Les essais par roulage coûtent très cher donc cette solution de mutualisation permet à tous les acteurs internationaux de la R&D automobile d’accéder aux data que leurs partenaires et concurrents veulent partager. »
La start-up yvelinoise Nexyad a aussi tapé dans l’œil du pôle grâce à SafetyNex, une application mobile qui estime en temps réel le risque de conduite. Elle alerte vocalement le conducteur avant un danger pour qu’il puisse ralentir, avec la promesse d’une réduction de 20% du nombre d’accident, et enregistre les profils d’usages et de risque des utilisateurs. Lauréate du BMW Tech Date en 2016, Nexyad s’adresse aux constructeurs et aux équipementiers qui veulent fournir une navigation intelligente en première et/ou en seconde monte ainsi qu’aux assureurs automobiles qui souhaitent proposer des contrats personnalisés. « Des négociations avancées sont déjà en cours avec des assureurs et la sortie officielle est proche », assure Thierry Bapin.
Nexyad Automotive & Transportation Newsletter #15 is Available
2017 Year of mass deployment for Nexyad Products
After three years of Nexyad products development, 2017 will see the start of mass deployment of its products. An Automotive EOM has integrated RoadNex & ObstaNex for road detection and obstacles detection on special vehicles and an Infrastructure EOM has integrated Visinex for visibility measurement on highways. Beside, we’ll soon announce our first customers for SafetyNex.
Headlines :
– Nexyad Review after the CES 2017 in Las Vegas
– Example of SafetyNex Risk Profiles Data
– SafetyNex App Risk Profiles Analysis
– Nexyad invited to the 4th “Les rencontres du Fleet Management”
– NEXYAD new award: Champion SME (PME championne) of the French cluster MOV’EO
– Interview of Mov’eo and Nexyad by AutoK7
– New Update for Nexyad Modules RoadNex (Road detection) & ObstaNex (Obstacles Detection)
We use cookies to understand how you use our site and to improve your experience. By continuing to use our site, you accept our use of cookies. AcceptPrivacy & Cookies Policy Read More
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.


 Takeoff at Paris CDG Airport Arrival in Las Vegas
Takeoff at Paris CDG Airport Arrival in Las Vegas
 Leddar Ecosystem Pavillon at LVCC Groupement ADAS Desk
Leddar Ecosystem Pavillon at LVCC Groupement ADAS Desk LeddarTech;
LeddarTech; 
 Innoviz Velodyne
Innoviz Velodyne
 Quanergy Pioneer
Quanergy Pioneer
 Startup II – VI Startup AEye
Startup II – VI Startup AEye

 Itron (Energy issues) Deloitte (Complete systems and strategy)
Itron (Energy issues) Deloitte (Complete systems and strategy)
 LoRa (IOT) Ericsson (Telecom 5G)
LoRa (IOT) Ericsson (Telecom 5G)
 Ujet Genze
Ujet Genze
 Navya IBM (Olli)
Navya IBM (Olli)
 Toyota (ePalette) Transdev
Toyota (ePalette) Transdev














 Example of Statitical Relationship in Risk Assessment : from Behaviour to Fatalities
Example of Statitical Relationship in Risk Assessment : from Behaviour to Fatalities






















{kind=link}