– ISFM selected Nexyad algorithms
– SafetyNex episode 6 : Five use cases when your eyes or sensors are not enough
– Autonomous Driving Adaptative to situations with SafetyNex
– Broad Range Applications of Real Time Driving Risk Assessment
– Deep Learning for Onboard Applications: Hidden Trap
– SafetyNex and the “S” Curve Theory
– Congresses & Events
NEXYAD is proud to announce that our Artificial Intelligence Algorithmes are used for Autonomous Driving Vehicles French High Tech Startup ISFM (Intelligent Systems for Mobility) selected Nexyad artificial intelligence algorithms for their Milla Smart Shuttle.
ISFM is one of the companies selected by the Ubimobility 2018 program
* * * * *
SafetyNex episode 6 :
Five use cases when your eyes or sensors are not enough
SafetyNex can save your life part 1: Rainy Curve
SafetyNex can save your life part 2: Tight Curve
SafetyNex can save your life part 3: Priority
SafetyNex can save your life part 4: Stop Sign
SafetyNex can save your life part 5: Pedestrians Crossing
* * * * *
Autonomous Driving Adaptative to situations with SafetyNex
HOW TO MAKE YOUR AUTONOMOUS DRIVING (AD) ADAPTIVE TO SITUATIONS THAT WERE NOT IMAGINED BEFORE
The true function of an autonomous vehicle is to move you from a point A to a point B, as quicly as possible, in comfort and safety (road safety : without accident and even without near-misses). Let’s talk about road safety because it is the job of NEXYAD with the Artificial Intelligence module SafetyNex.
20 times per second, SafetyNex estimates the risk that the driver (Driver is your Autonomous Driving system) takes. In an open world, new situations will happen (not in the scope of your scenarios) and if your AD is not adapted, risk will rise and SafetyNex will detect it. It opens the door to new strategies :
. Simple adaptive response : “if risk too high then slow down” for instance
. Complex adaptive system with deep Learning : if the response led to risk rising it is not the proper one … well it sounds you can improve your AD and even let it learn while it is in use in real vehicles !!!
And you even can modulate easily aggressiveness of your AD (necessary in dense urban areas).
* * * * *
Broad Range Applications of
Real Time Driving Risk Assessment
Driving risk is not predictable from the so called “black spots” location, or from only driving behaviour. Driving risk appears when driving behaviour is not adapted to driving context, and particular, to road infrastructure complexity. There is no inherently bad driving behaviour (it depends on WHERE you drive: a disused airport ? in front of a school ? approaching an intersection ? risk is different for all those case). There is no inherently dangerous infrastructure and all automotive projects that record “black spots” are doomed to failure : they are places where few drivers in the past had a driving behaviour that was not appropriate to infrastructure complexity, and they died in accident. Thousands, millions, of other drivers did not have any accident at this location. What will this information bring to YOU ? Nothing ! It is necessary to evaluate adequation of YOUR driving behaviour to infrastructure complexity.
An AI module does that 20 times per second: SafetyNex.
Driving risk computed by SafetyNex is a core notion with lots of different applications : car insurance, fleet management, commerce, ADAS, Autonomous Driving, Vocal Driving Assistants, …
* * * * *
Deep Learning for Onboard Applications: Hidden Trap
Now Deep Learning is used in onboard detection and pattern recognition applications. NEXYAD for instance uses Deep Learning in RoadNex (road detection without need of markings + detection of free space), and ObstaNex (obstacles detection).
But if you do not analyse your INDUSTRIAL project in detail, you may have bad surprises : everyone thinks he/she knows that the more numerous the training examples, the most accurate the KPIs. Let’s say you used 1 billion km to train and validate your Neural Network (NN) for computer vision. Now a new cam is launched on the market (32 bits per color, 10k) : If you want to use your NN, you will degrade quality of images and put them into your system. If you want to take advantage of your better camera, then you must capture 1 NEW billion km with the new cam and train a new NN.
NOT VERY INDUSTRIAL!
NEXYAD has developed a methodology to get same KPIs with a very picky compact database (easy to reshape the database with new sensors) : A.G.E.N.D.A. (Approche Générale des Etudes Neuronales pour le Développement d’Applications), published in scientific papers in the 90’s – yes – the 90’s by NEXYAD team.
* * * * *
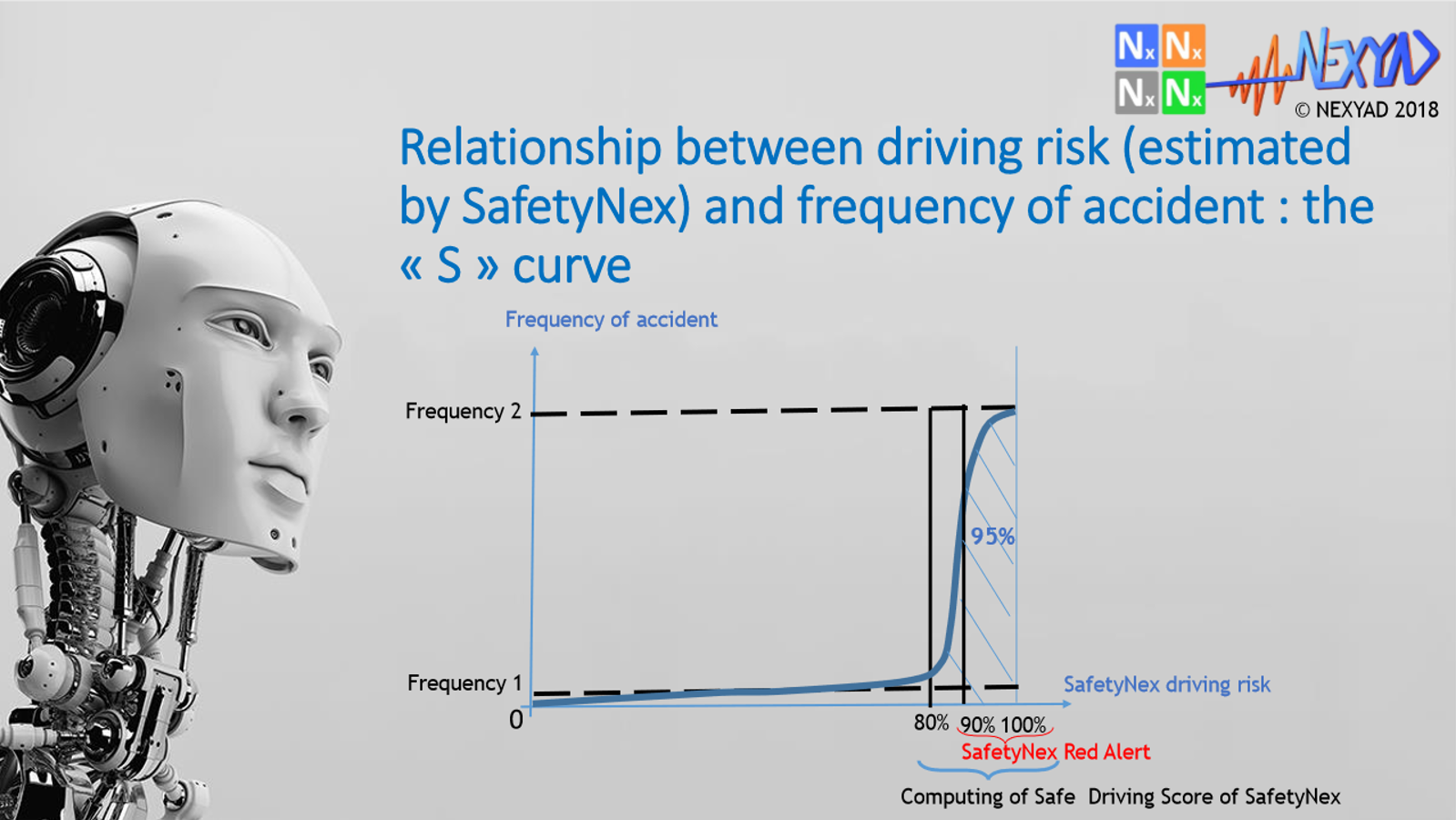
SafetyNex and the “S” Curve Theory
RELATIONSHIP BETWEEN DRIVING RISK AND ACCIDENT : THE “S” CURVE THEORY
Let’s say in a manufacture there is a very dangerous machine that may grind up your hand. If you are 10 km away from the machine, risk is “very” low. If you are 1 km away from the machine, risk is the same. If you are 10 m away from the machine … risk is still very low … but if you come closer (let’s say 10 cm), suddenly risk becomes high ! This is not linear. In road safety, the Artificial Intelligence algorithm SafetyNex estimates 20 times per second the driving risk you take, and many people ask about relationship between “risk you take” and “accident”. This relationship is not deterministic (probabilities must be used) : risk is not linked directly to accident but rather to accident frequency (or probability)… and the relationship is a non linear curve called a “S” curve as shown on the figure below. It is possible then to use it to alert human driver (Vocal Driving Assistants) or to control autonomous driving (Autonomous Vehicle) in order to keep risk under the threshold of the “S” curve or not too far after the threshold. SafetyNex was calibrated in order to have 95% of accident frequency just after the threshold (validated on 50 million km).
Click image to enlarge
* * * * *
Congresses & Events
NEXYAD CEO on Mobility TV about Road Safety applied to AV
Use the YouTube translation to follow with your language.
Gérard YAHIAOUI, CEO of NEXYAD, participed in a TV show on Mobility TV about the Autonomous Vehicle, where he explained the value of SafetyNex for road safety applied to Autonomous Vehicle. The other guests were Jean-Pierre CARNEVALE, departement director for Ipsos, Abdelkrim DOUFENE from IRT SystemX, and Hervé GROS from SIA (automotive engineers society), the talk show was animated by Patrick ROGER for Auto K7.
First French Congress devoted to Autonomous Vehicles
Last 25-26 june, SIA and URF jointly organized the first French conference on the autonomous vehicle in order to cross the views of the whole scientific and technical communities : car manufacturers, suppliers, road infrastructures, telecommunications and transport operators in connection with the national and territorial public decision-makers.
200 experts, 4 sectors, a dozen of exhibitors, 38 interventions, keynotes by Anne-Marie Idrac (AV special adviser), Cédric Villani (AI special adviser) and Luc Chatel (President of PFA), 1 round table of industrial leaders and the public sector, or how to draw up the state of the art for the biggest technological change in mobility and transport.
The goal is to accelerate the capacity for innovation everyone to serve everyone, by bringing all stakeholders together under the aegis of the most relevant experts for the autonomous vehicles of tomorrow.
Gerard Yahiaoui, CEO of Nexyad was invited to talk about SafetyNex on a focus about Intelligent Onboard Technologies.
Gérard Yahiaoui explaining SafetyNex
A.I. key of profitability Conference at TNP
This thursday 14th june, TNP, a consulting firm specializing in business transformation, inaugurated its new generation start-up accelerator! The audience follow interesting conference about Artificial Intelligence in Mobility field.
– Benoit Ranini, TNP : Introduction
– Philippe Giry-Deloison : Conseiller municipal de Neuilly sur Seine
– Stéphane Mallard : Artificial Intelligence, Get ready for disruption
– Juliette Girard, Renault & Adrian Pellegrini, Blue DME : Feedback on futuristic car dealership
– Gérard Yahiaoui, Nexyad : Intelligence on board with SafetyNex
– Demo and business dating with TNP Accelerator’s start-ups
Gérard Yahiaoui, CEO of Nexyad
The European Mobility Exhibition 2018
Transports Publics, the European Mobility Exhibition, is the not-to-bemissed biennial exhibition for all the key players in public transport and sustainable mobility from across Europe. Over 11,000 highly qualified participants come together over three days in Paris to discuss the latest innovations for urban, interurban and regional transport, as well as green mode transport.
Transports Publics is recognised as the leading European showcase for innovations in equipment, services and policies relating to the entire mobility sector, bringing together leading European decision-makers from transport and politics.
This year, we could see for the first time, the new technology for rear-vision on buses,coaches and trucks : the camera-based system instead of mirrors. We visited Vision Systems booth that is the first firm to propose such system with its Smart-Vision product.
Smart-Vision allows to save about 5% gas consumption, that reduces CO2 emissions; the cockpit screens for driver are much more efficient than mirrors, they eliminate sun glare or reflexion problems and of vehicles lights, and they increase visibility at night and tunnel conditions.
This solution has been integrated in Heuliez and Irizar buses as shown on the exhibition, and public transportation operators companies in Europe have already adopted Smart-Vision.
Vision Systems also shown a lidar perception system around vehicle called Savety-Front for collision avoidance.
The trend of 2018 was on electrification for buses in particular, and public transporation in general.
Autonomous pod or shuttle was not yet present except outside with Navya.
For the third consecutive time the Groupement ADAS (cluster) was present to the Autonomous Vehicle Technology World Expo at Messe Stuttgart 5-7 june 2018. Intempora and Nexyad represented the french-canadian cluster sponsorised by Mov’eo Imagine Mobility.
Edition 2018 was quite good, we propose a focus on some companies we saw to the convention.
The Elektrobit industry experts came to share their experience on how to effectively manage a functional and open HAD software architecture on an adaptive AUTOSAR infrastructure. They were keen to demonstrate how the functional software architecture with open interfaces and software modules is integrated on a high-performance microcontroller using an AUTOSAR adaptive middleware. In addition to the functional challenges, the transmission of integrity levels of automotive safety could be explained to you. EB booth visitors could appreciate why the advantage of combining an open software framework for automated driving with a reliable operating environment reduces time-to-market due to fast integration and first system-level testing.
ESI Group is a leading innovator in the field of virtual prototyping software and services. A specialist in materials physics, ESI has developed a unique skill to help industrial manufacturers replace physical prototypes with virtual prototypes, enabling them to manufacture, assemble, certify and pre-certify their future products. Coupled with the latest technologies, ESI now wants to anchor virtual prototyping in the broader product performance lifecycle concept, which addresses the operational performance of a product throughout its life cycle, from launch to disposal. The creation of a hybrid twin, based on simulation, physics and data analysis, allows manufacturers to deliver more readable and connected products.
Sigra Technologies was exhibiting its autonomous driving system, its components and services called Deep Einstein. Its products range from drive-by-wire embedded systems to decision-making based on a deep neural network. The company believes that an approach based on deep learning is the best way to handle hard-to-solve cases using traditional algorithms. During the exhibition, Sigra presented its new system for the demonstration of autonomous driving.
StreetDrone is an ambitious UK self-driving startup with a rich automotive, motorsport and entrepreneurial DNA. The streetDrone team is passionate about putting the AV revolution into the hands of the many , not just the few, providing the platform , data management system and functional safety, thereby allowing businesses and institutions to focus on their own development goals without having to worry about the cost and complication of vehicle hardware and systems engineering. StreetDrone is enabling the next generation of engineering to be involved in what is the most exciting area of technology today.
Veoneer is a leading system supplier for ADAS autonomous driving AD and advanced brake control solutions, and a market leader in automotive safety electronics products. With one of the oadest product portfolios in the larket, Veoneer is the forefront of innovation in the current revolution of the automotive industry. Veoneer takes on the challenge of automation and human-machine tion as vehicles become increasly intelligent.
Vector informatik is a leading manufacturer of software tools and embedded components for the development of electronic systems and their networking with many different systems from CAN to automotive Ethernet. Vector has been a partner of automotive manufacturers and suppliers and related industries since 1988; Its tools and services provide engineers with the decisive advantage to make a challenging and highly complex subject area as simple and manageable as possible. Worldwide customers in the automotive, commercial vehicles, aerospace, transportation and control technology industries rely on the solutions and products of the independent Vector Group for the development of future mobility.
The four algorithms products of Nexyad are now well known by automotive profesionals. Numerus companies worldwide integrated SafetyNex the on board Driving risk assessment in real time, combinable with the three camera-based modules: RoadNex for road detection (edges of road and bitumen free space); ObstaNex for obstacles detection (vehicles and pedestrians); and VisiNex for visibility measurement (fog and heavy rains detection, reliability, distance of visibility, etc.)
MOV’EO Imaging Mobility Forum 2018
Imaging Mobility Forum by MOV’EO, June 7th 2018 at ESTACA, Campus Paris-Saclay.
“Innovation Hubs : a new deal for efficient mobility”
Luc Chatel, PFA President Rémi Bastien, Mov’eo President
– Mov’eo General Assembly – 2017 Management & Financial report
– Keynote : opening by Luc CHATEL, Chairman, French Automotive Industry & Mobilities, Former French Secretary of State for Industry
– Tech Sessions : Blockchain: the ultimate bypassing. New Eldorado for mobility or just a buzz?
Smart Grid: the key for electric mobility solutions ?
ESTACA’LAB research activities on intelligent, clean and safe transport
Conference : Innovation Hubs : a new deal for efficient mobility
– Introduction by Rémi Bastien, Mov’eo Chairman & Ludovic Busson, ESTACA Chairman
– Keynote : Richard Dujardin, CEO France, Transdev & Patrick Pelata, Chairman, Meta Consulting LLC
– Roundtable – European clusters :
Rémi BASTIEN, VP Automotive Prospective, Groupe Renault, Chairman of Mov’eo & VEDECOM Institute
Leo KUSTERS, Managing Director, AutomotiveNL
Maren LOUCHET, International Cooperation, e-mobil BW
Laura MORGAGNI, CEO, Torino Wireless
DEEP LEARNING FOR ONBOARD APPLICATIONS: HIDDEN TRAP
Now Deep Learning is used in onboard detection and pattern recognition applications. NEXYAD for instance uses Deep Learning in RoadNex (road detection without need of markings + detection of free space), and ObstaNex (obstacles detection).
But if you do not analyse your INDUSTRIAL project in detail, you may have bad surprises : everyone thinks he/she knows that the more numerous the training examples, the most accurate the KPIs. Let’s say you used 1 billion km to train and validate your Neural Network (NN) for computer vision. Now a new cam is launched on the market (32 bits per color, 10k) : If you want to use your NN, you will degrade quality of images and put them into your system. If you want to take advantage of your better camera, then you must capture 1 NEW billion km with the new cam and train a new NN.
NOT VERY INDUSTRIAL!
NEXYAD has developed a methodology to get same KPIs with a very picky compact database (easy to reshape the database with new sensors) : A.G.E.N.D.A. (Approche Générale des Etudes Neuronales pour le Développement d’Applications), published in scientific papers in the 90’s – yes – the 90’s by NEXYAD team.
DEDICATED TO THE TESTING, DEVELOPMENT, AND VALIDATION OF AUTONOMOUS VEHICLES AND NEXT GENERATION ADVANCED DRIVER ASSISTANCE SYSTEMS!
31 MAY – 2 JUNE 2016 | STUTTGART, GERMANY
Full list of speakers confirmed include:
• Daniel Benhammou, CEO, Acyclica Inc
• Wolfgang Herzner, senior engineer, AIT Austrian Institute of Technology GmbH
• Paul Krutko, President & CEO, Ann Arbor SPARK
• Sandeep Sovani, director, global automotive industry, Ansys
• Marcos Pillado, project manager, Applus+ IDIADA
• Henning Lategahn, managing director, Atlatec GmbH
• Jeffrey Ferrin, head of research, Autonomous Solutions Inc
• Juergen Holzinger, project manager AVL-Drive, AVL List GmbH
• Alexander Noack, head of sales, b-plus GmbH
• Philipp Kerschbaum, HMI development, BMW Group
• Igor Doric, scientific and technical manager, CARISSMA
• Stefan Lüke, project manager, Continental Division Chassis & Safety
• Reija Viinanen, managing director, Fell Lapland Business Services
• David LaRue, manager ADAS/AD systems, FEV
• Francesco Crisci, senior test engineer, Fiat Chrysler Automobiles
• Adrian Zlocki, head ADAS department, FKA
• Manuel Merz, research engineer, Ford
• Stefan Wolter, HMI specialist, Ford
• Frederik Diederichs, senior researcher, Fraunhofer IAO
• Arno Eichberger, associate professor, Graz University of Technology
• Tom Lueders, director tools and testing, Hella Aglaia Mobile Vision GmbH
• Chris Reeves, commercial manager, future transport technologies, Horiba Mira Ltd
• Alexander Treis, business development manager, IEE SA
• Alice Siu Man Chan, senior research engineer, Institute for Infocomm Research
• Fu Keong Chia, research engineer, Institute for Infocomm Research (I2R), A*STAR
• Peter Vertal, head of research, Institute of Forensic Engineering, University of Zilina
• Fabian Bauer, engineer software development, IPG Automotive GmbH
• Edwin Nas, deputy project leader self-driving vehicles, Netherlands, Ministry of Infrastructure & the Environment
• Lyn Matten, managing consultant, MM1 Consulting & Management PartG
• Volker Scholz, managing partner, MM1 Consulting & Management PartG
• Dominic Gallello, CEO, MSC Software
• Gérard Yahiaoui, President and CEO, Nexyad
• Rien van der Knaap, managing partner, OC Mobility
• Mugur Tatar, managing director, QTronic GmbH
• Gerben Feddes, senior advisor intelligent mobility, RDW
• Heather Stoner, division manager, Realtime Technologies Inc
• Arnd Engeln, professor of Market and Advertising Research, Traffic and Transport Psychology, Stuttgart Media University
• Robert Friis, president, Summit Development Group LLC
• Saskia de Craen, senior researcher, SWOV Institute for Road Safety Research
• Rikke Kuipers, senior security specialist, Synopsys
• Brian Ceccarelli, owner, Talus Software
• Robin van der Made, product manager software and services, TASS International
• Padmanaban Dheenadhayalan, engineer, Tata Elxsi Ltd
• Maria Kreußlein, research assistant, Technische Universität Chemnitz
• Nicholas Clay, senior manager – testing, Thatcham Research
• Andrew Miller, chief technical officer, Thatcham Research
• Rebecca Advani, senior technologist, Transport Systems Catapult
• Nick Reed, academy director, TRL
• Paul Newman, BP Professor of information engineering, University of Oxford
• Alain Piperno, autonomous vehicles testing/homologation project manager, UTAC CERAM
• Patrice Reilhac, innovation and collaboration research director, Valeo CDA
• Oscar Slotosch, member of the board, Validas AG
• Ingo Nickles, field application engineer, Vector Software
• Diego Minen, technical director, VI-Grade
• Carina Björnsson, technical expert, driver assistance and active safety test methods, Volvo Car Corporation
• Aki Lumiaho, principal scientist, VTT Technical Research Centre of Finland Ltd
• Christian Purucker, project manager, WIVW GmbH
• Gunwant Dhadyalla, principal engineer, WMG, University of Warwick
ROBUSTNESS OF NEXYAD SOFTWARE MODULE FOR ROAD DETECTION : RoadNex
By NEXYAD
Detection of the road, detection of the lane, in front of the vehicle is now a « must-have »
for Advanced Driver Assistance Systems (ADAS) and of course for Autonomous Cars too.
Every R&D team is able to show cases of good detection. The difference between different
modules is robustness : ability to work in many cases (almost every cases).
For instance, robustness consideration led many big Automotive firms to interger the MOBILEYE
detection system : jus because MOBILEYE is more robust than detection systems developed by
those big firms. And robustness is not a matter of deployment : you won’t get a more robust
module is you put 10 000 developers on the project. You need time, big amount of data, and
« smart ideas ».
Note : This robustness definition leads to question on ADAS validation (« almost » every case is
not that well defined … how could we put some maths on those words). NEXYAD has been
developing an applied maths-based methodology for ADAS validation and is currently
recording a validation data base that will be soon available for free worldwide on the internet.
But let’s go back to road detection modules comparison.
There is another difference between road detection systems : do they need white markings
or are they able to work even without markings ?
NEXYAD founders has been working on road detection since the beginning of the 90’s and never
stopped (*). The NEXYAD team is one of the moste experienced team in the world about road detection.
That actually makes the difference, and RoadNex is a module that would take long to develop by
other teams. RoadNex is currently available on PC (windows, Linux) in the real time framework
RT-MAPS. RoadNex will be soon available :
. on electronic device of an Automotive Tier One Company
. on smartphones (so it works in real time on a smartphone usual processor ! try to compare to other modules)
(*) publication at a scientific congress in France in 1993 :
“Texture-based Image Segmentation for Road Recognition with Neural Networks”, G. Yahiaoui, M. de Saint Blancard,
Sixth international conference on neural networks and their industrial & cognitive applications NeuroNîmes93, EC2,
Nîmes, 1993,
In order to have an idea of what robustness means, here are some case used to test RoadNex :
How many kilometers should you drive to sample those few road scenes variations ?
SafetyNex & EcoGyzer : the Driver Behaviour Signature
SafetyNex is a Nexyad Module for ADAS that estimates the risk (or safety) in driving 100% correlated with accidentology. It is unique and disruptive in the whole world of Road Safety.
Recently, EcoGyzer a tool by the french company Nomadic Solutions, has been integrated to SafetyNex to estimate the Eco driving.
Now we are proud to announce that SafetyNex & EcoGyzer as a world premiere App estimating the Driver Behaviour Signature. To figure the Driver Behavour Signature, we imagined a special mapping as you’ll see on the demo films.
Every second in driving, one point is plotted on the mapping. The more right a point is, the more Eco is the driving; the more up, the more safe it is. At the end of the path, there is a cloud of points called the Driver Behaviour Signature.
In the following demo films, we show four different driving behaviour signatures for the same path :
The Good Driver
The Bad Driver
The Quiet-Dangerous Driver
The Sportive-Safe Driver
Comparison of the four Driver Behaviour Signatures
* * * * *
Nexyad ADAS Validation Database still in Progress
NEXYAD has been starting the development of a data base for artificial vision-based ADAS test and validation.
This data base will be relevant and unique because it is fully decribed in two ways :
. reality : position of road and obstacles
. driving situation (i.e. curve in a foggy weather with pedestrian crossing, …) using the methology AGENDA.
To read more :
– « Methodology for ADAS validation: Potential Contribution of other Scientific Fields which have already answered the Same Questions »,
G. Yahiaoui, P. Da Silva Dias, proceedings of the 3rd CESA Automotive Electronics Congress May 2014 Paris, Lecture Notes in Mobility,
ENERGY CONSUMPTION AND AUTONOMOUS DRIVING, Jochen Langheim Ed, Springer, pp 133-138.
– « Validation of Advanced Driving Assistance Systems », G. Yahiaoui, N. du Lac, SafetyWeek congress, Aschaffenburg, May 2015.
Business details :
A part of this data base will be soon available for free on the internet, to the worldwide ADAS and Autonomous
vehicle community (labos and firms).
If you wish to receive the link as soon as it is available, click HERE and fill the registration form.
(Free access to the NEXYAD Artificial Vision-based ADAS Validation Database)
The complete data base should be available soon through an annual membership.
For more information : contact NEXYAD Olivier BENEL +33 139 04 13 60
* * * * *
RoadNex v2.2 Robustness
On a new release v2.2 of RoadNex, we’ve added an arrow that shows the direction to be followed by the vehicle according to our road detection always defined by the edges of the rollable track and the surface of the rollable track. New tests were performed on videos of different types of roads, including tracks in the desert or lit roads by car lights at night.
These examples demonstrate the robustness of our module software that is more and more a reel competitor of lanes Detection System developed by Mobileye.
https://nexyad.net/Automotive-Transportation/wp-content/uploads/2015/10/Article-CCFA.png
To read more :
https://nexyad.net/Automotive-Transportation/wp-content/uploads/2015/10/Article-Cleo.png
NEXYAD Automotive & Transportation Newsletter n°4, le 24 août 2015
Base de données de validation des ADAS utilisant des caméras
La société NEXYAD démarre actuellement la construction d’une base de données pour la validation des systèmes d’aides à la conduite et de délégation de conduite (ADAS et Autonomous car) en utilisant la méthodologie AGENDA publiée dans les années 90 par Gérard Yahiaoui (méthodologie au départ destinée à maîtriser entre autre la construction des bases de données d’apprentissage et des tests pour la mise en œuvre des réseaux de neurones).
Cette base de données a deux caractéristiques essentielles :
1) Situations de vie
En effet, la méthodologie AGENDA préconise de décrire les variations possibles des signaux et images d’entrées en facteurs de la variabilité et leurs croisements.
Exemple, pour de la détection d’obstacles :
. météo (temps sec couvert, temps ensoleillé, pluie, brouillard)
. luminosité globale (faible, moyenne, forte)
. vitesse du véhicule porteur (faible, modérée, grande)
. type de route (autoroute, route avec marquage, route sans marquage, …)
. revêtement (bitume 1, bitume 2, …, pavés)
. jour / nuit (phares et éclairages de l’infrastructure allumés)
. saison (printemps, été, automne, hiver)
. etc …
> type d’obstacle :
– arrêté
. liés à l’infrastructure : bornes de travaux, péages, …
. liés aux usagers : pneu sur la chaussée, colis tombé d’un camion, motard allongé sur la
route suite à un accident, véhicule en panne arrêté sur la chaussée, piéton immobile sur le
bord de la chaussée (embusqué / non embusqué)
– en mouvement
. camion, voiture, vulnérable (piéton, vélo, moto) avec à chaque fois les trajectoires types (longitudinale dans le sens de roulage, longitudinale dans le sens inverse du roulage, latérale) et la position (en face, à froite, à gauche).
. Etc…
On constate que si l’on croise ces facteurs, on trouve assez rapidement un nombre de cas énorme. Or, la mise au point des systèmes ADAS est complexe, et il est nécessaire de procéder par itérations successives, en partant de situations simples pour aller vers les situations compliquées.
Notre base de données permet cela, puisque tous les enregistrements sont décrits en termes de croisements des modalités des facteurs de la variabilité. On sait ainsi exactement dans quels cas on a testé ou pas le système.
Le formalisme de ‘croisement des modalités des facteurs de variabilité’ permet d’utiliser les plans d’expériences, et en particulier les plans fractionnaires orthogonaux pour réduire fortement le nombre de cas à tester tout en garantissant une couverture maximale des situations de vie. On peut dans ce cadre mettre au point un ADAS sur un plan fractionnaire orthogonal et le tester dur d’autres plans fractionnaires orthogonaux par exemple.
2) Réalité terrain
Il s’agit de détourer sur les images les obstacles et éléments de l’infrastructure (marquages, bords de route, etc) de manière à constituer une référence permettant de mesure la performance du système.
. Exemple de situations de vie :
1.1, été, temps couvert, route sans marquage, vitesse modérée, pneu sur la chaussée, temps sec
1.2, été, temps couvert, route sans marquage, vitesse modérée, colis sur la chaussée, temps sec
2.1, été, temps couvert, route sans marquage, vitesse modérée, piétons immobiles non embusqués au bords de la chaussée, temps
2.2, été, temps couvert, route sans marquage, vitesse modérée, humain allongé sur la chaussée, temps sec
etc …
Il n’est pas certain que l’on puisse rencontrer ces quelques cas, même en roulant 1 million de km sur route ouverte !
Objectif
NEXYAD démarre son recueil d’images et de données :
. vidéo (vers l’avant du véhicule) couleur
. accéléromètres
. gyromètres
Les fichiers sont synchronisés par l’outil RT-MAPS de la société INTEMPORA. INTEMPORA.
Les fichiers sont enregistrés au format RT-MAPS et directement rejouables par cet outil.
NEXYAD cherche actuellement des contributeurs sur ce projet interne. Les contributeurs co financent et ont en retour un accès gratuit à la base de données, illimité dans le temps. Cette contribution permettra d’accélérer le travail de recueil et d’étiquetage.
NEXYAD souhaite mettre à disposition cette base avant Juin 2016, de manière gratuite pour donner de la matière à la communauté des ADAS et du véhicule autonome, pour une version réduite de la base, et de manière payante (sous forme d’abonnements) pour la base complète.
L’ambition de NEXYAD est de propager son expertise méthodologique et de permettre à chacun d’évaluer les performances des systèmes de vision pour les ADAS, qu’il s’agisse des systèmes développés par NEXYAD, ou d’autres.
Références
“Methodology for ADAS Validation: Potential Contribution of Other Scientific Fields Which Have Already Answered the Same Questions”, Gérard Yahiaoui, Pierre Da Silva Dias, CESA congress Dec 2014, Paris, proc. Springer Verlag
“Methods and tools for ADAS validation”, Gérard Yahiaoui, Nicolas du Lac, Safetyweek congress, May 2015, Aschaffenburg
Contact
Pour toute question ou pour devenir un contributeur, contactez NEXYAD : +33 139041360
At the safety week symposium in Aschaffenburg (Germany), NEXYAD presented :
. A paper about ADAS validation : methodology and tools
. The products on the booth : RoadNex (road detection), ObstaNex (Obstacles detection), VisiNex Onboard (visibility measurement), SafetyNex (estimating safety level of driving).
NEXYAD has got a booth at the Safety Week symposium in Aschaffenburg in Germany from may 19th to 21st showing the module RoadNex (road detection), ObstaNex (obstacle detection) running in the real time environment RT-MAPS, and available for customers that want to quickly develop an autonomous vehicle/demo car. Those modules are under shifting to smart phones and electronic devices.
NEXYAD also presents a paper written with the company INTEMPORA, about ADAS validation methodology and tools.
NEXYAD is member of the “Groupement ADAS”.
We use cookies to understand how you use our site and to improve your experience. By continuing to use our site, you accept our use of cookies. AcceptPrivacy & Cookies Policy Read More
Privacy & Cookies Policy
Privacy Overview
This website uses cookies to improve your experience while you navigate through the website. Out of these, the cookies that are categorized as necessary are stored on your browser as they are essential for the working of basic functionalities of the website. We also use third-party cookies that help us analyze and understand how you use this website. These cookies will be stored in your browser only with your consent. You also have the option to opt-out of these cookies. But opting out of some of these cookies may affect your browsing experience.
Necessary cookies are absolutely essential for the website to function properly. This category only includes cookies that ensures basic functionalities and security features of the website. These cookies do not store any personal information.
Any cookies that may not be particularly necessary for the website to function and is used specifically to collect user personal data via analytics, ads, other embedded contents are termed as non-necessary cookies. It is mandatory to procure user consent prior to running these cookies on your website.